



Új robotok a Mitsubishi kínálatában
Kecskés András – AxiCont Kft.
 Kaizen – azaz: „jó irányba történő változás, folyamatos fejlődés”. A japán szó nemcsak egy módszert, hanem egy teljes gondolkodásmódot takar, amelynek a Mitsubishi – mint Japán egyik legnagyobb vállalata – igyekszik messzemenően megfelelni. A fejlődés töretlen. Bár a gyártó hosszú életciklusú robottermékcsaláddal büszkélkedhet, időről időre újabb modellekkel jelenik meg a 2…20 kg-os, 4 és 6 tengelyes robotok piacán.
Kaizen – azaz: „jó irányba történő változás, folyamatos fejlődés”. A japán szó nemcsak egy módszert, hanem egy teljes gondolkodásmódot takar, amelynek a Mitsubishi – mint Japán egyik legnagyobb vállalata – igyekszik messzemenően megfelelni. A fejlődés töretlen. Bár a gyártó hosszú életciklusú robottermékcsaláddal büszkélkedhet, időről időre újabb modellekkel jelenik meg a 2…20 kg-os, 4 és 6 tengelyes robotok piacán.
A SCARA-robotok megújulása
2012 első felében a robotpaletta megújulása elsősorban a SCARArobotokat érinti. A 4 tengelyes, vízszintes felépítésű SCARA-robotok általában két kartagból, két normál, függőleges tengelyből, valamint egy forgatható és függőlegesen mozgatható golyósorsóból állnak. Eddig ezek a robotok jellemzően talpon álltak, most viszont a Mitsubishi bemutatta első függesztett elrendezésű SCARA-robotját.
Függesztett elrendezésű robotok
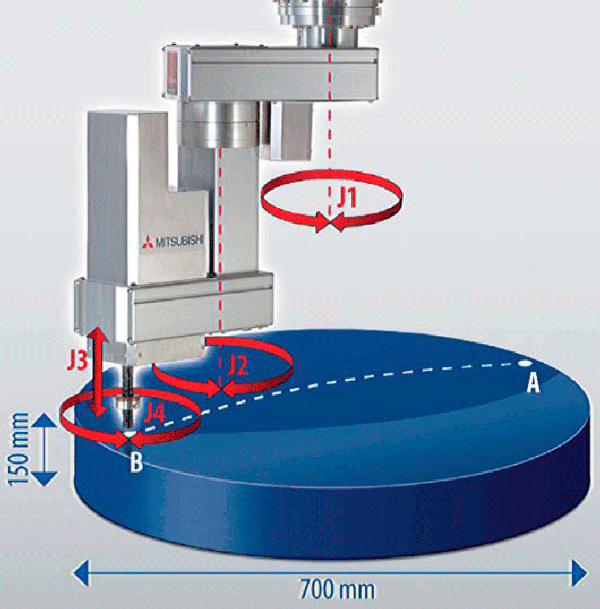
A függesztett elrendezés legnagyobb előnye a nagyobb összefüggő munkatér, mivel a robot a saját talpa alatti területen is képes dolgozni. Ezenkívül a robot képzeletbeli talpának egyik oldaláról a másikra történő áthaladás lényegesen gyorsabbá válik, mivel a talpöntvényt nem kell megkerülni. A munkatér ennek következtében lényegében egy 700 mm átmérőjű és 150 mm magas henger, amelynek minden pontját el tudja érni a robot közvetlenül onnan, ahol éppen áll. Egy ekkora munkatérbe könnyen elhelyezhető a robot teherbírásához illeszkedő, kisméretű alkatrészek szerelőüléke, a szerelést kiszolgáló szállítórendszer vagy a körasztalszegmens feladópontja, de akár egy paletta vagy egy áthaladó szállítópálya is. A géptervezők jóval szabadabban tudnak tervezni, a kész gép pedig kisebb helyen elfér, és kompaktabb kivitelű lehet, a munkatér pedig könnyen áttekinthetővé válik.
A fejlesztésnek köszönhetően tovább nőtt a tengelyek gyorsító-, illetve lassítóképessége, ennek következtében 1 kg terhelés esetén a szabványos 12”-os ciklusidő 0,32 s lett, azaz percenként több mint 90 ciklus. Ráadásul az apró elmozdulásokkal járó munkafázisok még sokkal gyorsabban végrehajthatók, vagyis a zsírozásos, diszperzálós, kamerás ellenőrző vagy darabszortírozó feladatok időigénye egyre kevésbé múlik a roboton.
A függesztett kivitel további előnye a végrehajtó egység felülről megvalósítható, egyszerűbb kiszolgálása akár elektromos vagy pneumatikus vezetékekkel, zsírtömlővel vagy optikai szállal, mivel ezek nem akadnak bele a robot testét kiszolgáló saját kábelezésbe. A robotkart gyárilag a testben futó kábelezéssel szerelték fel, amelyből a megfogó szerkezethez 8 bemenet és 8 kimenet tartozik. A kábelek vagy a pneumatikacsövek pedig akár a golyósorsón is átvezethetők.
A robot névleges terhelhetősége 1 kg, ez a tömeg maximálisan 3 kg-ig növelhető. Saját tömege 24 kg, 0…40 °C közötti hőmérséklet- tartományban üzemeltethető, IP20-as védettségű, vezérlője CR2D- vagy CR2Q-típusú. R32TB- vagy R56TB-típusú kézivezérlő is kapcsolható hozzá.
Talpon álló SCARA-robotok továbbfejlesztése
 A talpon üzemelő SCARA-robotok palettája is kibővült egy új fejlesztésű 3 kg-os és egy továbbfejlesztett 6 kg-os robottal. Az új robotkonstrukciónak köszönhetően minden kábelezés a robot testében fut, nincs külső kábelcső. Védettebb lett a golyósorsó is, emiatt kevésbé érzékeny a környezet hatásaira.
A talpon üzemelő SCARA-robotok palettája is kibővült egy új fejlesztésű 3 kg-os és egy továbbfejlesztett 6 kg-os robottal. Az új robotkonstrukciónak köszönhetően minden kábelezés a robot testében fut, nincs külső kábelcső. Védettebb lett a golyósorsó is, emiatt kevésbé érzékeny a környezet hatásaira.
Megújultak a meghajtásért felelős motorok és erősítők is. A rendkívül gyors mechanikát hasonló teljesítményű elektronika szolgálja ki. A villámgyors, 64 bites processzorral szerelt vezérlő 7 ms-ként szolgáltatja a mozgáshoz szükséges adatokat a meghajtásért felelős egységnek. Eközben képes a kézi vezérlővel, az őt irányító külső vezérléssel, egyéb hálózati, valamint külső tengelyes és kamerás IO-kapcsolataival kommunikálni akár több program párhuzamos futtatása közepette is.
A robot vezérlőjébe gyárilag integrálták a külső tengelyvezérlést, amely képes akár 8 tengely egyidejű vezérlésére. Ebből 2 tengely a robot mozgásához lineárisan interpolálható, és a tracking (szállítószalag követő) funkciója, illetve akár két encoder fogadása is lehetséges egyidejűleg. A perifériák számára a vezérlő egy 100 Mbit/s-os Ethernet-csatolót is tartalmaz, ezen keresztül programozható, valamint valós idejű vezérlésre is használható (external real-time control). Széria a szenzormentes, szoftveres ütközésvédelem, a lekódolható robotprogram, a több robot egyidejű összehangolt mozgását megvalósító interfész, a kétkörös vészstop és az ajtónyitás-érzékelő biztonsági kör, valamint az USB-n keresztül frissíthető robotfirmware.
A vezérlőkbe integrálták a vision rendszerek egyszerű csatlakoztatását, a Cognextípusú intelligens kamerák közvetlenül hozzákapcsolhatók, néhány paraméter megfelelő beállítás után automatikusan OP-rendszer szinten kommunikálnak, és alkalmasak a 3D-s látórendszerek adatainak feldolgozására is. Szintén integrált a GOT-típusú, érintőképernyős operátorpanelek kommunikációja, amelyen keresztül az összes konfigurált, hálózatra kötött robot vezérlője is elérhető. Hiba esetén a karbantartó a hozzá legközelebb eső GOT-on keresztül meg tudja nézni a robot állapotát, és a géphez már a ténylegesen szükséges felszereléssel érkezik.
Robotvezérlő típusok és szoftverek
A robotokhoz kétféle robotvezérlőt választhatunk. A D-sorozatú az önállóan üzemelő robotok vezérlésére készült, a Q-sorozatú pedig a több robotból és eszközből álló iQ-rendszerek irányítására. Az iQ-rendszerű robotvezérlőket beintegrálták egy moduláris PLC-be. Ez azt jelenti, hogy a vezérléssel közvetlen és nagyon gyors kapcsolatban van. Bármilyen PLC-s modult is használunk, mindegyik rendelkezésére áll a robot vezérlőjének, legyen az akár hálózatos, digital IO, analóg konverter vagy egy másik robot vezérlője. Az így összeállított rendszer rendkívül hatékonyan képes a vezérlési, üzemeltetési, adatgyűjtési és diagnosztikai feladatokat elvégezni.
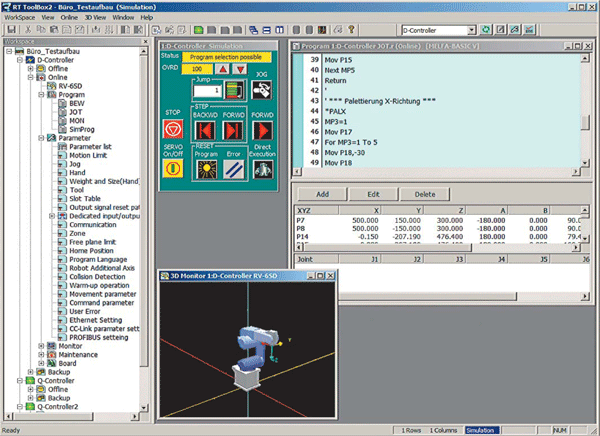
A hatékony robotos rendszer hasonlóan nagy tudású prog ramozói szoftvercsomagot igényel. A teljesen új fejlesztésű iQ Works-keretrendszer része az RT Toolbox 2 robotprogramozó szoftver, amellyel hatékonyan lehet a robot programját elkészíteni és a pozíciókat betanítani vagy kiszámoltatni. Az RT Toolbox 2 alkalmas a programozáson túl a robot paramétereinek monitorozására, és akár a teljes robotvezérlő tartalmának lementésére, archiválására is. Segítségével a robotpozíciók néhány referenciapont megadásával másodpercek alatt beállíthatók, robotcsere, tengelyhajtómű vagy a motor cseréje esetén az állásidő minimálisra csökkenthető. A tervezett karbantartások könnyebben időzíthetők, mivel a szoftver alkalmas a karbantartási adatok megjelenítésére.
A robotok várható legfőbb piaca az autóipari beszállító háttér, az elektronikai ipar, a gyógyszeripar, az élelmiszer-ipari feldolgozógyárak, az édesség- és kekszgyártó üzemek; funkciójukat tekintve pedig az összeszerelés, az ömlesztett áru szortírozása, továbbá a rendezés, selejtválogatás, palettázás stb.
Mitsubishi Electric Europe B.V.
Balán Péter értékesítési vezető – Magyarország
Mobil: +36 70 3322 372
E-mail:
AxiCont Kft.
1131 Budapest, Reitter F. u. 132.
Tel.: +36 1 412 0882
Fax: +36 1 412 0883
E-mail:














