



Motorvezérlőkben használt analóg alkatrészek
 A hajtások minden ipari automatizálási rendszer létfontosságú elemei. A háromfázisú kefe nélküli egyenáramú (BLDC), az állandó mágneses szinkron (PMSMS) és az indukciós motorok rendkívül népszerűek, és megbízható módszerek a mozgások megvalósítására, legyen szó akár egy szállítószalagról vagy egy robotkarról. A motorvezérlők biztosítják az alapvető áramellátási és mechanikus meghajtási funkciókat.
A hajtások minden ipari automatizálási rendszer létfontosságú elemei. A háromfázisú kefe nélküli egyenáramú (BLDC), az állandó mágneses szinkron (PMSMS) és az indukciós motorok rendkívül népszerűek, és megbízható módszerek a mozgások megvalósítására, legyen szó akár egy szállítószalagról vagy egy robotkarról. A motorvezérlők biztosítják az alapvető áramellátási és mechanikus meghajtási funkciókat.
A motorok és szervók azonban, mint minden mechanikus alkatrész, elhasználódnak, ami végül meghibásodáshoz vezethet. A prediktív karbantartási rendszerek segítenek az üzem megbízható működésében, miközben csökkentik a zavaró és nem tervezett állásidővel járó költségeket. A motorok kopásának nyomon követésére használt egyik technika az állapotfigyelési megközelítés, amely ultrahangot használ a motor zajjelzésében bekövetkező változások észlelésére.

Ez a cikk a motormeghajtó tápegységének fontosságát, a meghajtó áramkörök áramérzékelését és az ultrahangos állapotfigyelését vizsgálja.
Motorhajtások, minden mozgásvezérlő alkalmazás nélkülözhetetlen részei
A kefe nélküli egyenáramú motorok a rotorhoz nyomott szénkefék helyett elektronikai alapú kommutációs módszert alkalmaznak. A kefés motoroknál az állórészben (házban) rögzített mágnesek vannak, a rotor körül pedig forgó elektromágneses mezőtekercsek – az armatúra. A népszerű háromfázisú kefe nélküli módszer megfordítja ezt a megközelítést, a mágneses mezőt három rögzített mezőtekercs és egy mágneses rotor segítségével forgatja. Ez kiküszöböli a kefék rendszeres cseréjének szükségességét, és sokkal energiatakarékosabb. Mindegyik tekercset egy-egy high-side és low-side teljesítmény-MOSFET hajtja meg impulzusszélesség-modulációs (PWM) jellel. A PWM jeleket többféleképpen lehet levezetni és a tengely forgását elérni, de mindegyik nagyfokú motorfordulatszám-szabályozást biztosít a terhelési feltételek széles skáláján.
A mozgásvezérlő meghajtó felépítése
Az 1. ábra az ipari mozgásvezérlő hajtás fő funkcionális blokkjait mutatja be.
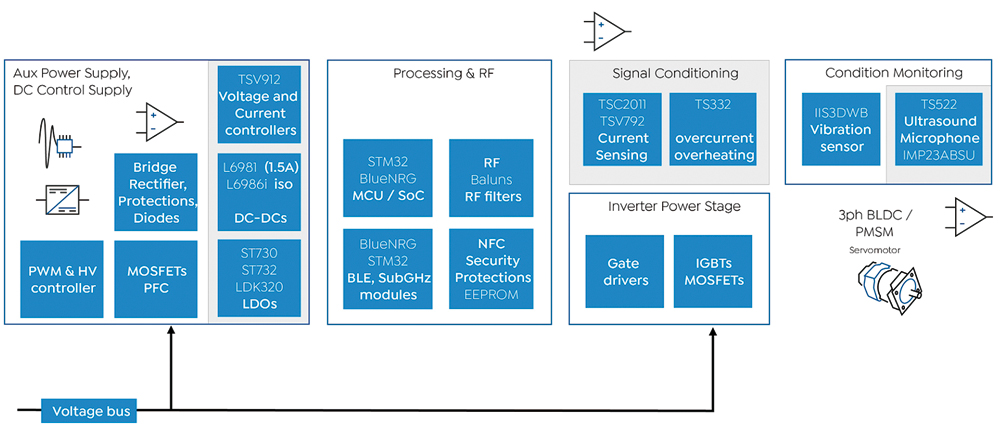
1. ábra A diszkrétalapú mozgásvezérlő hajtás elsődleges építőelemei (forrás: ST)
A motorvezérlő általában egy padlón elhelyezett vezérlőszekrényben helyezkedik el. A működési hatékonyság javulása, például az Ipar 4.0, az elektronikai alapú vezérlőrendszerek használatát nemcsak a gépek működtetésére és vezérlésére, hanem a gépek működési állapotának optimalizálására és felügyeletére is alkalmazza. Mivel a gyári padlóterület már most is szűkös, a gépgyártóknak a lehető legkisebbre kell méretezniük a vezérlőrendszereket, hogy a szekrényben a lehető legkisebb helyet foglalják el. A felesleges hő minimalizálása rendkívül hatékony és kis teljesítményű alkatrészek használatával döntő fontosságú.
A motorvezérlő architektúra kiemeli az elektronika sokféleségét viszonylag közel egymáshoz/relatív fizikai közelségben. Például a teljesítmény szempontjából a motor mezőtekercseit meghajtó nagy teljesítményű Si/SiC MOSFET-ek vagy IGBT-k az egészen kis jelekkel dolgozó jelkondicionáló funkciókig. Amint az 1. ábrán látható, a meghajtórendszer a tápellátásból, a feldolgozásból és a csatlakoztathatóságból, a motor meghajtásából, valamint az érzékelő és jelkondicionáló funkciókból áll. A motor állapotának felügyelete is egyre inkább a mozgásmeghajtás integrált funkciója. Mint minden mechanikus alkatrész, a motorok is hajlamosak a kopásra, a leggyakrabban a csapágyak és a tömítések kopnak el. A túlzott csapágykopás speciális MEMS rezgésérzékelővel végzett rezgéselemzéssel vagy akusztikus és ultrahangos érzékelési módszerekkel detektálható.
Alacsony zajszintű DC-DC átalakítás
A tápegység a mozgásmeghajtás összes áramköri funkciója számára közös. Jellemzően egyetlen tápfeszültségből több feszültségsávra van szükség és különösen az érzékelő áramkörök esetében alapvető fontosságú a tápfeszültségsávok elektromos zajmentessége. A zaj hozzájárulhat egy instabil és kiszámíthatatlan folyamathoz bármely visszacsatolási hurokban. A tápegység sínjén indukált zajcsúcsok vagy hullámzás például átterjedhet a vezérelt folyamatra, ami a motor enyhe sebességváltozását eredményezheti.
A motorvezérlő a váltakozó áramú hálózati tápfeszültséget az egységen belüli elosztáshoz rögzített egyenáramú kimeneti feszültséggé alakíthatja át. Az egyes áramköri funkciók ezután egy DC-DC átalakítót használhatnak a feszültségnek az áramkör igényei szerinti növelésére vagy csökkentésére. A DC-DC átalakítás megvalósítására többféle módszer létezik. Bár a folyamatot általában átalakításnak nevezik, a legtöbb esetben magában foglalja a kimeneti feszültség meghatározott határokon belüli szabályozását is. Például egy átalakító adatlapján szerepelhet a névleges kimeneti feszültség ±0,5%-os szabályozása is bizonyos terhelési körülmények között.
Az általános átalakítási módszerek közé tartoznak a lineáris szabályozók, valamint a buck- és boost kapcsolóüzemű átalakítók. A lineáris szabályozók csak a bemeneti feszültségnél alacsonyabb kimeneti feszültséget tudnak biztosítani, például +12 V DC bemenetet és +3,3 V DC kimenetet. A kapcsolóüzemű konverter azonban növelheti (boost) vagy csökkentheti (buck) a bemeneti feszültséget.
Egy példa a step-down buck konverter IC-re a 38 V 1,5 A ST L6981. A kifejezetten 12 V-os és 24 V-os ipari rendszerekben való használatra tervezett, nem szigetelt L6981 3,5 V és 38 V közötti bemeneti feszültségeket képes fogadni, és 0,85 V és Vin közötti kimenetet szolgáltat. A 2. ábra az eszköz belső felépítését szemlélteti.
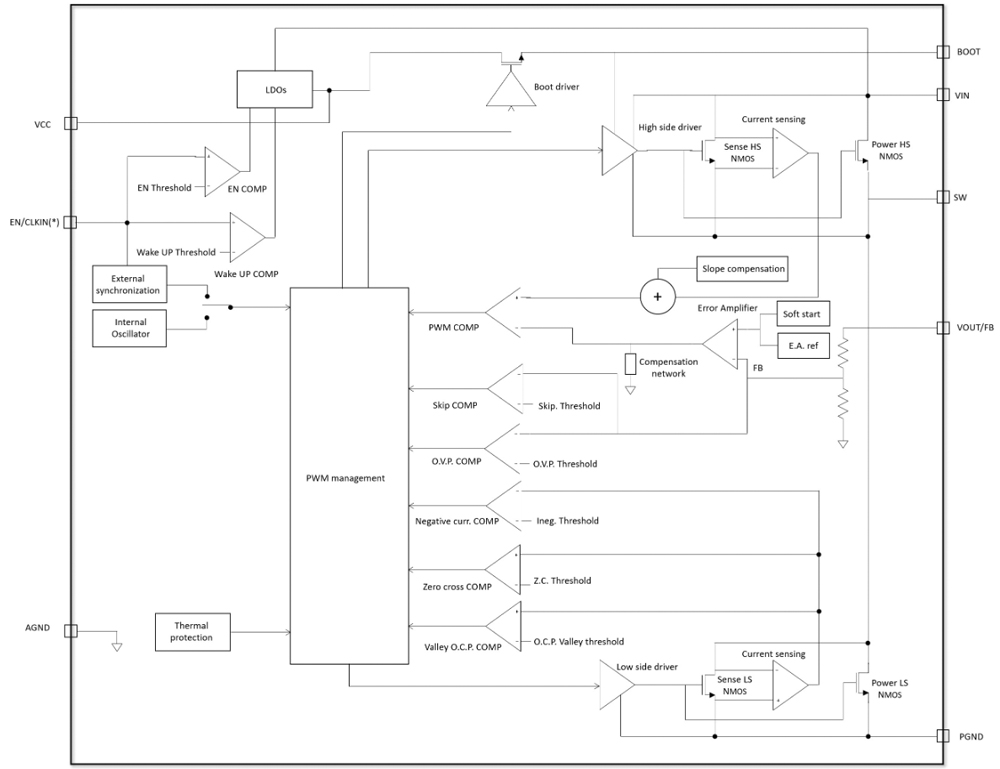
2. ábra Az ST L6981 38 V 1,5 A szinkron step-down konverter belső felépítése (forrás: ST)
A két FET szinkron topológiát biztosít, amely egy külső induktivitást és kondenzátort hajt meg, és a PWM meghajtójel kitöltési tényezője határozza meg a kimeneti feszültséget. Amikor a terhelési áram a 350 mA-es küszöbérték alatt van, az L6981C (alacsony fogyasztású) változat pulzuskihagyási üzemmódba lép, hogy növelje a könnyű terhelés hatékonyságát. Az pulzuskihagyás azonban frekvenciaváltozásként figyelhető meg, amely a tápsínen zajként érzékelhető. Ezért létezik egy alacsony zajszintű változat is (L6981N), amely nem mutat energiatakarékos működést kis terhelésnél, és ezért érzékenyebb terhelésekhez alkalmasabb zajszámmal rendelkezik. Továbbá az L6981N szinkronizálható külső órajelekre, amelyeket több eszközzel is meg lehet osztani a lapon. Az L6981 LNM tipikus átalakítási hatásfoka 90%, amikor 1 A-t ad le a terhelésre (Vin 24 V, Vout 5 V, f 400 kHz).
Pontos áramérzékelés elérése motorhajtásokban
Egy háromfázisú BLDC motor biztonságos meghajtásához és vezérléséhez változó terhelési körülmények között és különböző sebességek mellett az egyes mezőtekercseken átfolyó áram gondos ellenőrzésére van szükség. Az árammérés jellemzően a söntellenálláson keresztüli feszültségesés mérését jelenti. Rendkívül kis értékű ellenállást használnak annak elérésére, hogy a terhelésen a feszültségesés elhanyagolható legyen, valamint nagy áramok esetén a hőleadás minimálisra csökkentése érdekében. A söntellenálláson megjelenő feszültség azonban kicsi, ezért a digitális ábrázoláshoz való átalakítás előtt erősítésre van szükség. A jel erősítésére ideális a műveleti erősítő; a megfelelő műveleti erősítő kiválasztásakor azonban döntő fontosságú az eszköz ofszetfeszültségére (Vio), hőstabilitására és az erősítés sávszélességszorzatára (GBP) való odafigyelés. Azt is szem előtt kell tartani, hogy az alacsonyabb értékű söntök nagyobb erősítést igényelnek, ami alacsonyabb pontossághoz és kisebb eredő jelsávszélességhez vezet.
Az ofszetfeszültség egy kulcsfontosságú paramétere a műveleti erősítőknek – a műveleti erősítő differenciális bemenetei közötti egyensúlyhiányra utal, amely kimeneti feszültséget eredményez. Ideális esetben a kimenetnek nullának kell lennie, amikor mindkét bemenet nulla. A differenciális bemenetek azonban nem ugyanazokat a jellemzőket mutatják a gyártás során fellépő enyhe gyártási és kémiai különbségek miatt. Az ofszetfeszültség az a feszültségkülönbség a bemeneteken, amely a nulla kimeneti feszültség eléréséhez szükséges. Egyes alkalmazások esetében az ofszetfeszültség nem feltétlenül fontos kritérium; azonban tekintsük meg a 3. ábrán kiemelt árammérési példát.

3. ábra A Vio hatása egy motorvezérlő áramérzékelő alkalmazásra (forrás: ST)
A 3. ábra egy 0,1 Ohm-os söntellenálláson keresztüli árammérést szemléltet egy motormeghajtó hídáramkörben. A műveleti erősítő 1000-es erősítéssel rendelkezik, és a megfelelő sebességnél 100 µV jelenik meg a söntön. Tökéletes esetben, 1000-es erősítéssel 100 mV-os kimenet lép fel. A példában egy ST TSZ121 nagy pontosságú, alacsony ofszetfeszültségű műveleti erősítőt használunk. A TSZ121 Vio-karakterisztikája 25 °C-on mindössze 5 µV, és 8 µV a teljes hőmérséklet-tartományban, -40 °C-tól +125 °C-ig. A Vio-t hozzáadva az érzékelt 100 µV-hoz, a differenciális bemenet 105 µV, ami 5%-os hibát ad a motor érzékelt sebességében. Tekintsünk meg azonban egy 100 µV-os ofszetfeszültségű műveleti erősítőt, ami 100%-os hibát eredményez.

4. ábra A chopper-stabilizált műveleti erősítő a bemenetek felcserélésével és az ofszet átlagolásával nagy pontosságú, alacsony ofszetfeszültségű kimenetet ér el (ST forrás)
A TSZ121 precíziós műveleti erősítők családja a chopper-architektúrát alkalmazva alacsony ofszet-drift jellemzőket ér el a hőmérséklet és a frekvencia függvényében – lásd a 4. ábrát. A chopper-stabilizált műveleti erősítő folyamatosan korrigálja a bemeneteken fellépő hibákat a bemenetek szinkronizált cseréjével. Ezután egy aluláteresztő szűrő átlagolja a kimeneti értéket, ami az ofszetfeszültség és a hőmérsékleti drift megszüntetését eredményezi.
BLDC motor állapotfelügyelete ultrahang segítségével
A motor rezgés- vagy hangjelzéseinek figyelése megbízható módszernek bizonyul a mechanikai csapágykopás kimutatására. A kopás korai jelzései elegendő időt biztosítanak az üzem vezetésének a karbantartás ütemezéséhez, hogy korlátozzák a zavarokat, és elkerüljék a költséges, nem tervezett leállásokat. Az előre betanított gépi tanulási algoritmusok is segíthetik a karbantartó csapatokat, mivel a zajjelekből következtethetnek arra, hogy melyik csapágy szorul cserére. A 20 kHz és 80 kHz közötti ultrahangos spektrumban történő megfigyelés különösen hatékonynak bizonyul a közelgő meghibásodások korai jelzésére.

5. ábra Az ST IMP23ABSU nagy teljesítményű MEMS-mikrofon, 80 kHz-ig lapos frekvenciaválaszú, ultrahangos alkalmazásokhoz (forrás: ST)
Az ultrahangalapú állapotfigyelési alkalmazásokhoz alkalmas MEMS-mikrofonra példa az ST IMP23ABSU – lásd az 5. ábrát. Ez az analóg kimeneti mikrofon 80 kHz-ig lapos frekvenciaválaszú és minden irányú érzékenységi mintázatú. Felületre szerelhető tokozatának méretei 3,5 mm × 2,65 mm × 0,98 mm.
A 6. ábra az IMP23ABSU ajánlott alkalmazási áramkörét mutatja be, amely a kimeneti jel erősítésére egy műveleti erősítőt használ. Az ST TS522 ideális műveleti erősítő ehhez az alkalmazáshoz. Ez a precíziós, alacsony zajszintű kettős műveleti erősítő alacsony, 850 µV bemeneti ofszetfeszültséggel és 4,5 nV/√Hz alacsony zajparaméterrel rendelkezik.

6. ábra Ajánlott alkalmazási példa az IMP23ABSU ultrahangos MEMS-mikrofon a TS522 alacsony zajszintű műveleti erősítő használatával (forrás: ST)
A mozgásvezérlő meghajtókhoz elengedhetetlen analóg alkatrészek
Ez a cikk az ipari motorvezérlőkben használt néhány analóg alkatrészre világít rá. A precíz, alacsony zajszintű analóg eszközök kiválasztása biztosítja, hogy a zárt mozgásszabályozási hurkok és az állapotfigyelő alkalmazások megbízhatóak és stabilak legyenek. Egy alacsony ofszetfeszültségű műveleti erősítő kiválasztása például biztosítja, hogy a motor fordulatszáma szorosan a specifikáción belül maradjon.
A cikkben bemutatott ST-alkatrészek az EBV-től, az ST hivatalos forgalmazójától szerezhetők be.
Az EBV Elektronik – mint vezető félvezető-forgalmazó Európában – széles gyártói portfóliójából a legújabb alkatrészek és félvezető-megoldások teljes és folyamatos ellátását garantálja. Vegye fel a kapcsolatot az EBV technológiai és piaci szakértőivel, hogy az alkalmazásaihoz az optimális megoldást választhassa!
Több mint disztribúció – EBV Elektronik!
Gnyálin István
EBV Elektronik Kft.
1117 Budapest, Budafoki út 91–93.
Tel.: +36 30 470 34 96
E-mail: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
www.ebv.com














