



LIDAR az autonóm rendszer tervezéséhez
 A körülöttünk lévő világ észlelése kihívást jelent. A tárgyak felderítésére/észlelésére és osztályozására vonatkozó tervezési követelmények megértése elősegíti a biztonságos és költséghatékony megoldás elérését. A teljesen autonóm holnap ígérete már nem tűnik álomnak. Ma az autonómia körüli kérdések az alapul szolgáló technológiákra és az autonómia megvalósításához szükséges fejlesztésekre összpontosítanak.
A körülöttünk lévő világ észlelése kihívást jelent. A tárgyak felderítésére/észlelésére és osztályozására vonatkozó tervezési követelmények megértése elősegíti a biztonságos és költséghatékony megoldás elérését. A teljesen autonóm holnap ígérete már nem tűnik álomnak. Ma az autonómia körüli kérdések az alapul szolgáló technológiákra és az autonómia megvalósításához szükséges fejlesztésekre összpontosítanak.
A lézeralapú távérzékelés (LIDAR) az autonóm alkalmazásokra való áttérést támogató egyik leginkább tárgyalt technológiává vált, de még sok kérdés nyitott.
A 100 m-nél nagyobb hatótávolságú és 0,1°-os szögfelbontású LIDAR-rendszerek továbbra is az önvezető gépjárművekkel kapcsolatos technológia fontos elemei. Azonban nem minden autonóm alkalmazás igényli ezt a teljesítményszintet. Olyan automatizált alkalmazások, mint a parkolásiasszisztens-szolgáltatás (valet park assist) és az utcaseprés, csak két ilyen példa. Ezeknek az alkalmazásoknak több mélységérzékelő technológia is az alapja lehet, mint például a rádióérzékelés és távolságmérés (radar), a sztereolátás, az ultrahangos érzékelés és távolságmérés, valamint a LIDAR. Ám ezen érzékelők mindegyike egyedi kompromisszum a teljesítmény, a formatényező (form factor) és a költség összefüggésében. Az ultrahangos készülékek ár szempontjából a legkedvezőbbek, de érzékelési tartományuk (hatótávolságuk), felbontásuk és a megbízhatóságuk korlátozott. A radar hatótávolsága és megbízhatósága jelentősen javult, de szögfelbontási korlátai is vannak, míg a sztereolátás nagy számítási költséggel és a pontosság korlátozásával járhat, megfelelő kalibrálás hiányában. Az átgondoltan megtervezett LIDAR-rendszer precíz mélységérzékeléssel, finom szögfelbontással és alacsony bonyolultságú feldolgozással megszünteti ezeket a hiányosságokat, még nagy távolságok esetében is. A LIDAR-rendszereket azonban általában terjedelmesnek és költségesnek tekintik, aminek nem feltétlenül kell így lennie.
A LIDAR-rendszer tervezése azzal kezdődik, hogy meghatározzuk a legkisebb méretű objektumot, amelyet a rendszernek érzékelnie kell, az adott objektum reflektivitását, és azt, hogy az adott objektum milyen távolságra helyezkedik el. Ez határozza meg a rendszer szögfelbontását, ebből kiszámítható a minimálisan elérhető jel-zaj viszony (SNR), amely az objektum észleléséhez szükséges igaz / hamis, pozitív vagy negatív detektálási kritérium. A megfelelő tervezési kompromisszumokhoz szükséges észlelési környezet és információmennyiség megértése lehetővé teszi az optimális megoldás kifejlesztését mind a költségek, mind a teljesítmény szempontjából. Vegyünk például egy önvezető gépkocsit, amely 100 km/h sebességgel halad egy úton, összehasonlítva egy autonóm robottal, amely egy gyalogos térben vagy raktárban 6 km/h sebességgel mozog. Nagy sebesség esetén releváns lehet, ha nemcsak a 100 km/h sebességgel haladó járművet vesszük figyelembe, hanem egy másik járművet is, amely ugyanolyan sebességgel halad az ellenkező irányba. Egy érzékelő rendszer számára ez egyenértékű egy 200 km/h relatív sebességgel közeledő objektummal. Egy LIDAR-érzékelő esetében, amely legfeljebb 200 m távolságban észleli az objektumokat, mindössze egy másodperc elteltével a járművek 25%-kal csökkentenék a köztük lévő távolságot. Hangsúlyozni kell, hogy a jármű sebessége (vagy a tárgy nemlineáris közeledési sebessége), a féktávolság és a kitérő manőverek végrehajtásának dinamikája minden helyzetben egyedülállóan összetett. Általánosságban kijelenthető, hogy a nagy sebességű alkalmazásokhoz nagyobb hatótávolságú LIDAR-rendszerekre van szükség.

1. ábra LIDAR-rendszer 32 függőleges csatornával, vízszintesen pásztázva a környezetet 1°-os szögfelbontással
A LIDAR-rendszer tervezésének másik fontos jellemzője a felbontás. A finom szögfelbontás lehetővé teszi a LIDAR-rendszer számára, hogy egyetlen objektumról több pixelben fogadja a visszatérő jeleket. Amint az az 1. ábrán látható, az 1°-os szögfelbontás oldalanként 3,5 m pixelt jelent 200 m távolságban. Az ekkora pixelek nagyobbak, mint sok észlelni kívánt objektum, ami számos kihívást jelent. Először is, a térbeli átlagolást gyakran használják a jel-zaj viszony és az észlelhetőség javítására, de objektumonként csak egy képpontot használva ez nem jelent alternatívát. Továbbá még akkor is, ha észlelik, lehetetlenné válik az objektum méretének megjósolása. Egy úttörmelékdarab, egy állat, egy közlekedési tábla és egy motorkerékpár általában kisebb, mint 3,5 m. Ezzel szemben egy 0,1°-os szögfelbontású rendszer pixeljei tízszer kisebbek, és hozzávetőlegesen öt szomszédos visszatérő jelet kell mérnie egy átlagos szélességű autónál 200 m távolságban. Méreteit tekintve, a legtöbb autó általában szélesebb, mint amilyen magas, ezért ez a rendszer valószínűleg megkülönböztetheti az autót a motorkerékpártól.
Annak felismerésére, hogy egy objektum felett biztonságosan áthajthatunk, a magasság meghatározása szempontjából sokkal finomabb felbontás szükséges, mint például az azimut. (Az azimut az a szög, amelyet egy objektumon áthaladó magassági kör képez a meridiánnal.) Könnyen elképzelhető, hogy mennyire eltérőek lehetnek egy autonóm vákuumrobot működése szempontjából meghatározott követelmények, mivel lassan halad, és keskeny, azonban magas tárgyakat – például asztallábakat – kell észlelnie.
2. ábra A LIDAR-rendszer különálló alkotóelemei
A megtett távolság és sebesség, valamint az objektum és az azt követő teljesítménykövetelmények megállapítása révén meghatározható a LIDAR-rendszer tervezésének architektúrája. Számos választási lehetőség létezik, például pásztázás vagy villanó fény (flash), az úgynevezett közvetlen repülési idő (direct Time of Flight – ToF) vagy hullámforma-digitalizálás, de kompromisszumaik meghaladják a cikk kereteit. Függetlenül attól, hogy melyik architektúrára esik a választás, az Analog Devices nagy teljesítményű jellánc- és energiagazdálkodási összetevőinek gazdag portfóliója (lásd a 2. ábrát) biztosítja azokat az építőelemeket, amelyek ahhoz szükségesek, hogy a különböző igényű rendszereket, például a formatényező és a költségek szempontjából, megtervezzék.
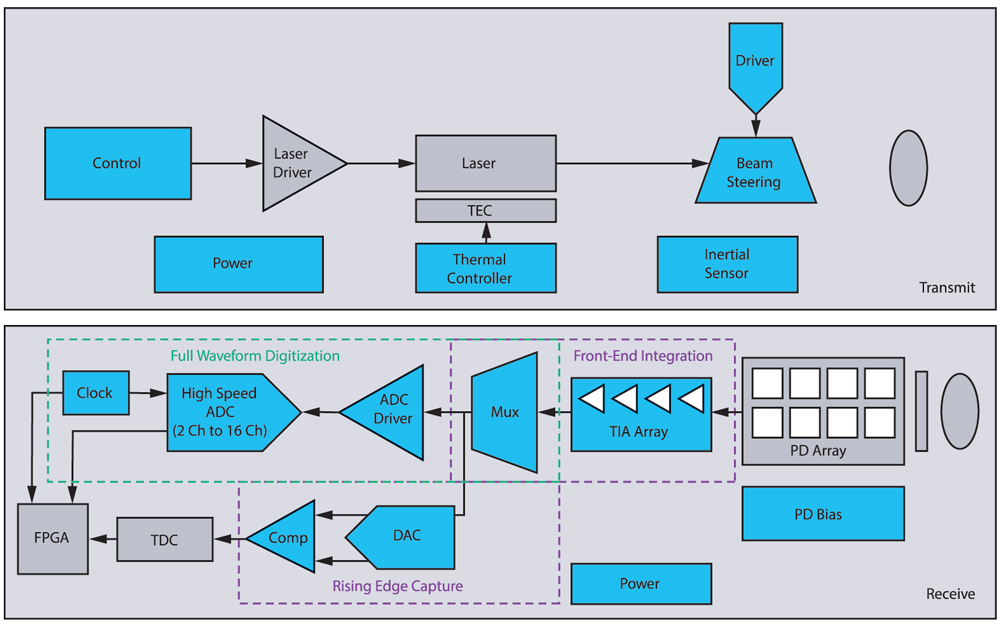
Az AD-FMCLIDAR1-EBZ egy nagy teljesítményű LIDAR-prototípus-platform, és egy 905 nm-es lézerfény-hullámhosszon működő, impulzusüzemű direkt ToF LIDAR-fejlesztőkészlet. Ez a rendszer lehetővé teszi a robotika, a drónok, valamint a mezőgazdasági és építőipari gépek, továbbá az 1D statikus villanó fény (flash) konfigurációjú ADAS / AV gyors prototípus-készítését. Az ehhez a referenciatervhez kiválasztott komponensek hosszú hatótávú, pulzáló LIDAR-alkalmazásra irányulnak. A rendszert egy nagy sebességű, kettős 4 A-os MOSFET-tel működő, ADP3634 kapuvezérlő által hajtott 905 nm-es lézerforrással tervezték. Tartalmaz még egy First Sensor cég által gyártott 16 csatornás APD (avalanche photodiode – lavina fotodióda) mátrixot, egy LT8331 típusú programozható tápegységet, az APD tápfeszültség előállításához. A konfigurációban az alacsony zajszint és a nagy sávszélesség miatt több 4 csatornás LTC6561 transzimpedancia-erősítő (TIA) is megtalálható, valamint egy AD9094 1 GSPS (Gsamples/s – Gminta/másodperc) mintavételezési sebességű, 8 bites analóg-digitál konverter (ADC), amelynek a legalacsonyabb csatornánkénti energiafogyasztása 435 mW / csatorna. Továbbra is szükség lesz a sávszélesség és a mintavételi arány növelésére, ami hozzájárul a rendszer nagyobb képváltási sebességéhez és a jobb hatótávolsági pontossághoz. Ugyanakkor fontos az energiafogyasztás minimalizálása, mivel a kisebb mértékű hőelvezetés leegyszerűsíti a termikus/mechanikai kialakítást, és lehetővé teszi a csökkentett formatényezőt.

3. ábra Analog Devices AD-FMCLIDAR1-EBZ LIDAR-fejlesztői megoldás rendszerarchitektúrája
A hatótávolság vagy a felbontóképesség pontossága az ADC mintavételi sebességétől függ. A hatótávolság pontossága lehetővé teszi a rendszer számára, hogy pontosan meghatározza, milyen messze van egy objektum – ami kritikus lehet olyan esetekben, amelyek közeli mozgást igényelnek, például parkolás vagy raktárlogisztika. Ezenkívül a távolság időbeli változása segít a sebesség kiszámításában, és ez a felhasználási körülmény gyakran még nagyobb távolsági pontosságot igényel. Egyszerű küszöbérték-algoritmussal, például a közvetlen repülési idővel (DToF) az elérhető tartományi pontosság 15 cm egy 1 ns-os (1 GHz) mintavételi periódus alatt – az 1 GSPS mintavételi sebességű ADC-vel. Tekintettel az ADC jelenlétére, kifinomultabb technikák – például interpoláció – használhatók a távolság pontosságának javítására. Becslés szerint a távolság pontossága nagyjából a jel-zaj viszony (SNR) négyzetgyökével javítható. Az adatok feldolgozásának egyik legnagyobb teljesítményű algoritmusa egy illesztett szűrő, amely maximalizálja a jel-zaj viszonyt, majd az interpoláció a legjobb távolság-pontosság eléréséhez.
A LIDAR-rendszer tervezésében segítséget nyújtó eszköz, az EVAL-ADAL6110-16 egy nagymértékben konfigurálható kiértékelőrendszer. Egyszerűsített, mégis konfigurálható, 2D flash LIDAR-mélységérzékelő valós idejű (65 Hz) objektumészlelést/nyomkövetést igénylő alkalmazásokhoz, például ütközések elkerülésére, magasság megfigyelésére a sima leszálláshoz.
A referenciatervben alkalmazott optika 37° (azimut) és 5,7° (magasság) látómezőt eredményez. Azimut orientált 16 pixeles lineáris mátrix esetén a pixelméret 20 m-nél összehasonlítható egy átlagos felnőttel, 0,8 m (azimut) × 2 m (magasság). Amint azt korábban említettük, a különböző alkalmazásoknak eltérő optikai konfigurációra lehet szükségük. Ha a meglévő optika nem felel meg az alkalmazás igényeinek, a nyomtatott áramköri kártya könnyen eltávolítható a házból és beépíthető egy új optikai konfigurációba.
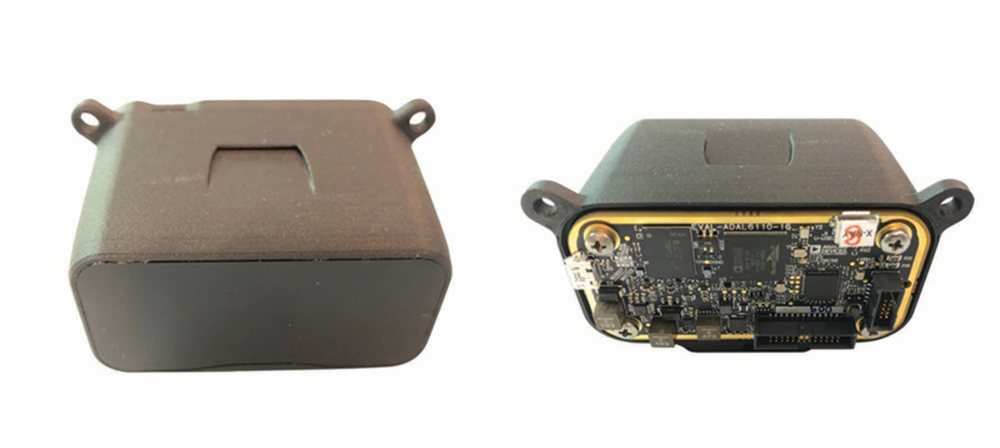
4. ábra EVAL-ADAL6110-16 LIDAR-kiértékelő modul/fejlesztőkészlet az integrált 16 csatornás ADAL6110-16 segítségével
A kiértékelő, fejlesztőrendszer az ADI ADAL6110-16 köré épül, amely egy kisfogyasztású, 16 csatornás, integrált LIDAR-jelfeldolgozó (LSP). Az eszköz biztosítja az időzítés vezérlését az érdeklődési terület megvilágításához, az időzítést a vett hullámforma mintavételezéséhez és a rögzített hullámforma digitalizálásának lehetőségét. Az ADAL6110-16 integrált érzékeny analóg csomópontjai csökkentik a zajszintet, lehetővé téve a rendszer számára, hogy nagyon alacsony jel-visszajelzéseket is rögzítsen, szemben azzal, hogy ugyanazt a jelláncot diszkrét, hasonló tervezési paraméterű alkatrészekkel valósítsák meg, ahol az effektív zaj uralhatja a tervet. Az integrált jellánc segítségével megvalósítható a LIDAR-rendszer méret, súly és energiafogyasztás csökkentésével együtt járó tervezése.
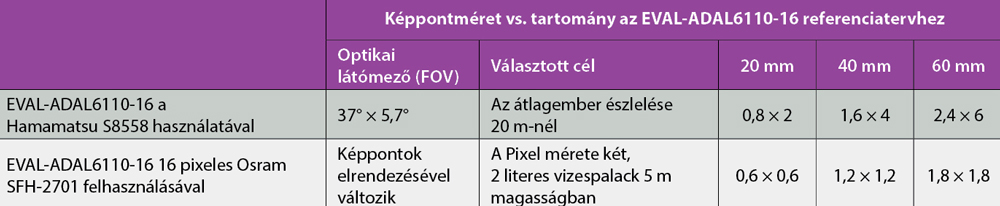
1. táblázat Az EVAL-ADAL6110-16 készülékben használt vevő mérete és optikája, valamint egy potenciális pixelelrendezés, ha a vevőt SFH-2701fotódiódákra cserélik
A rendszerszoftver lehetővé teszi a gyors beüzemelést a mérések elvégzéséhez és a távolságmérő rendszerrel való munka megkezdését. Teljesen önálló és egyetlen, USB-n keresztüli 5 V-os tápfeszültségen működik és robot operációs rendszer (ROS) meghajtóival is könnyen integrálható egy autonóm rendszerbe. A felhasználóknak csak egy csatlakozást kell megvalósítaniuk, hogy összekapcsolják robotjukkal vagy járművükkel, és a négy elérhető kommunikációs protokoll – SPI, USB, CAN vagy RS-232 – egyikén keresztül kommunikáljanak. A referenciaterv különféle vevő- és sugárzótechnológiákhoz adaptálható. További információ az EVAL-ADAL6110-16 és az ADAL6110-16 LSP-ről az analog.com/LIDAR-webhelyen található.
Mint korábban említettük, az EVAL-ADAL6110-16 referenciaterv vevőkészülék-technológiája módosítható különböző konfigurációk létrehozására, az 5-7. ábrák szerint. Az EVAL-ADAL6110-16 egy Hamamatsu S8558 16 elemű fotodióda mátrixot tartalmaz. Az 1. táblázatban látható változó távolságú pixel mérete a tényleges, 0,8 mm × 2 mm-es pixelméreten alapul, egy 20 mm-es gyújtótávolságú lencsével. Például, ha ugyanazt a táblát egyedi fotodiódákkal terveznénk át, mint például az Osram SFH-2701, egyenként 0,6 mm × 0,6 mm aktív területtel, akkor a pixelméret ugyanazon tartományokban nagymértékben különbözne attól, mint a látómező (FOV) pixelmérete.
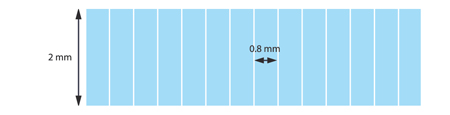
5. ábra A Hamamatsu S8558 PIN fotodióda-mátrix méretei
Példaként tekintsük át az S8558-at, 16 pixel egy vonalban, mindegyik pixel mérete: 2 mm × 0,8 mm (6. ábra)
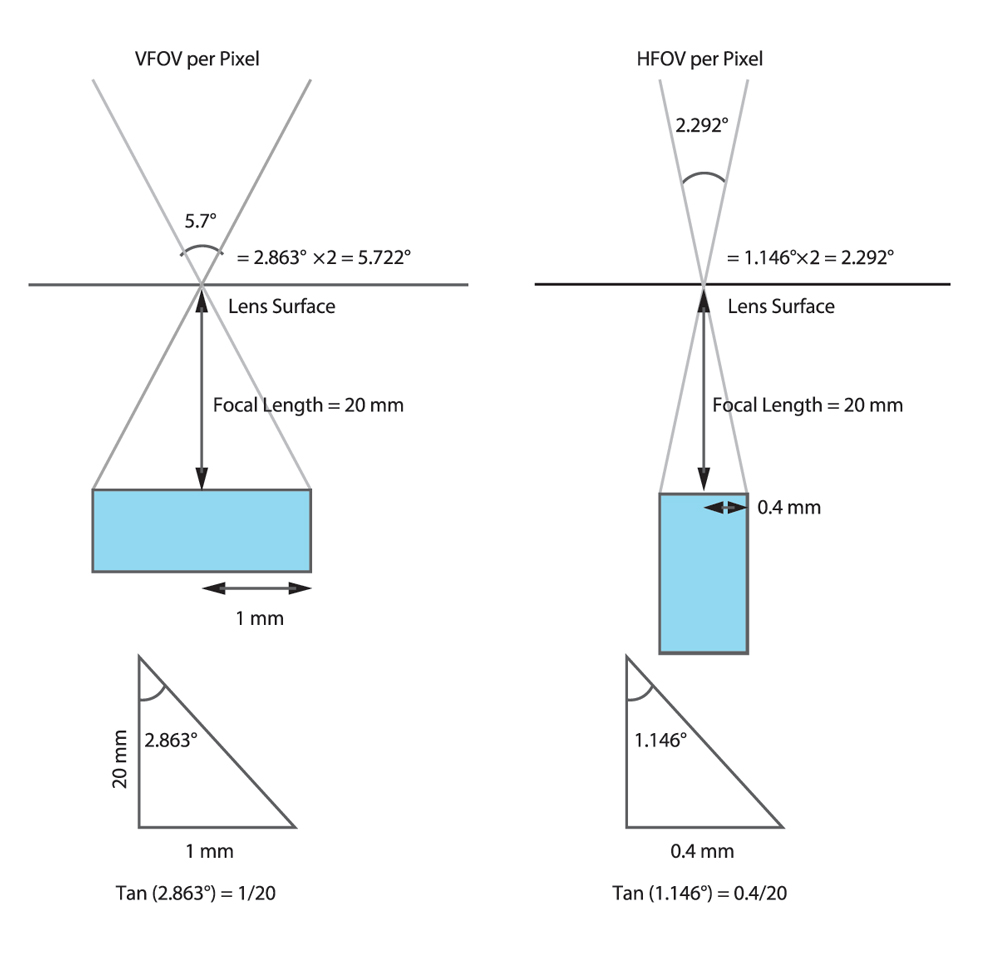
6. ábra A szögfelbontás egyszerű kiszámítása egyszerű optika segítségével
A 20 mm-es gyújtótávolságú lencse kiválasztása után a pixelenkénti függőleges és vízszintes látómező (FOV) kiszámolható az alap trigonometria alkalmazásával, amint az a 6. ábrán látható. Természetesen a lencse kiválasztása további, összetettebb szempontokat is magában foglalhat, például aberrációs korrekciót és térgörbületet. Az ilyen alacsony felbontású rendszerek esetében azonban gyakran elegendőek az egyszerű számítások.
A kiválasztott 1 × 16 pixeles FOV használható olyan alkalmazásokban, mint objektumok észlelése és az ütközések elkerülése az önjáró járművek és az önálló földi járművek számára, vagy lehetővé teszi a robotok egyidejű lokalizálását és feltérképezését (SLAM-simultan localizatiom and mapping) útvonalak szempontjából korlátozott környezetekben, például raktárakban.
Egy egyedi alkalmazás magában foglalja a mátrix konfigurálását egy 4 × 4-es rácsban a rendszer körüli objektumok észlelésére. Ez a fejlesztés alatt álló alkalmazás a buszokra és a szabadidős járművekre kerül, mint „biztonsági buborék” a jármű körül, amely figyelmeztetheti a vezetőt, ha a buszok közelében figyelemzavaros személyek járnak. A rendszer észlelheti az egyén járási irányát, és figyelmeztetheti a vezetőt a jármű leállítására, illetve hogy kürtjével figyelmeztesse a gyalogost, az egyént, pl. egy kerékpárost elgázolásának megakadályozása céljából.
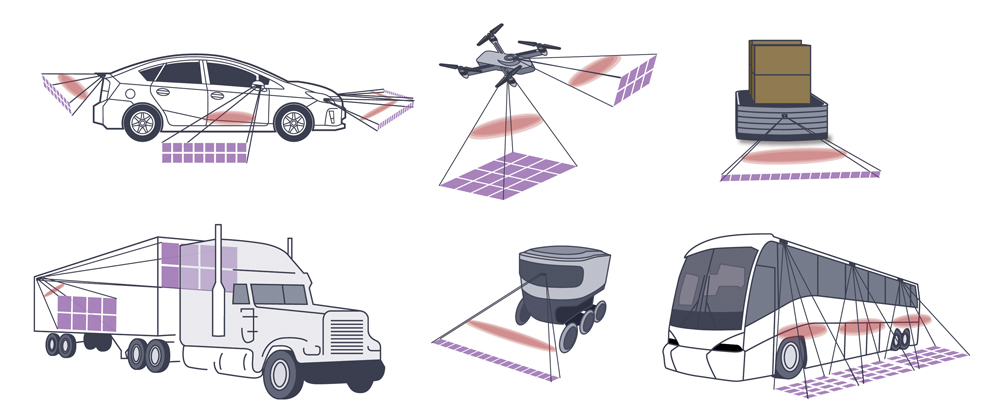
7. ábra A LIDAR-rendszer különféle optikai megvalósításai, amelyek hozzájárulhatnak az alkalmazások biztonságának növeléséhez
Természetesen nem minden alkalmazás igényel 0,1°-os szögfelbontást és 100 m hatótávolságot. Szánjon időt arra, hogy LIDAR-rendszertervezés szempontjából átgondolja, mire van szüksége az alkalmazásnak, majd világosan határozza meg a legfontosabb kritériumokat – például az objektum méretét, a reflektivitást, az objektumtól való távolságot és az autonóm rendszer haladási sebességét. A kiegyensúlyozott tervezés érdekében mindez információval szolgál az alkatrészek kiválasztásához; a rendszerhez szükséges funkcionalitáshoz képesti optimális teljesítmény és költség eléréséhez, ami végső soron növeli a sikeres tervezés valószínűségét.
További műszaki és kereskedelmi információkat az Analog Devices hivatalos hazai forgalmazójától, az Arrow Electronics Hungary-től kaphatnak.
Szerzők: |
Sarven Ipek – Alkalmazástechnikai mérnök |
Ron Kapusta – Alkalmazástechnikai mérnök |
Arrow Electronics Hungary
1138 Budapest, Váci út 140.
Bihari Tamás
Senior Field Application Engineer
E-mail: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
Tel.: +36 30 748 04 57














