



Helytakarékosság a villanymotorok vezérlőegységeinek kialakításánál
 A villanymotor-vezérlő áramkörök tervezői karcsúbb eszközöket tudnak kialakítani a nagy integráltsági fokú kapuvezérlő áramköröknek a villanymotor-vezérlő rendszerek legkritikusabb elemeinek új generációjához fordulva.
A villanymotor-vezérlő áramkörök tervezői karcsúbb eszközöket tudnak kialakítani a nagy integráltsági fokú kapuvezérlő áramköröknek a villanymotor-vezérlő rendszerek legkritikusabb elemeinek új generációjához fordulva.
A vezeték nélküli készülékek, például szerszámgépek, porszívók és e-kerékpárok kifejlesztése nagy teljesítménysűrűséget, magas hatásfokot és lítiumionos akkumulátorokról működtetett háromfázisú, szénkefe nélküli egyenáramú (BLDC) villanymotorokat kíván meg. Az elvárás miatt azonban – hogy a még kisebb méretű elektromechanikus készülékek kialakításához még több helyet takarítsanak meg – a tervezőkre nagy nyomás nehezedik – hogy még tovább zsugorítsák a villanymotorok motorvezérlő elektronikáját. Ez nem egyszerű feladat.
Eltekintve azoktól a nyilvánvaló nehézségektől, amelyeket a vezérlőáramkör alkatrészeinek parányi helyre való bezsúfolása jelent, ha minden alkatrészt közelebb préselünk egymáshoz, akkor újabb problémaként jelentkezik a hőelvezetés, valamint természetesen az elektromágneses zavarás (EMI) okozta gondok.
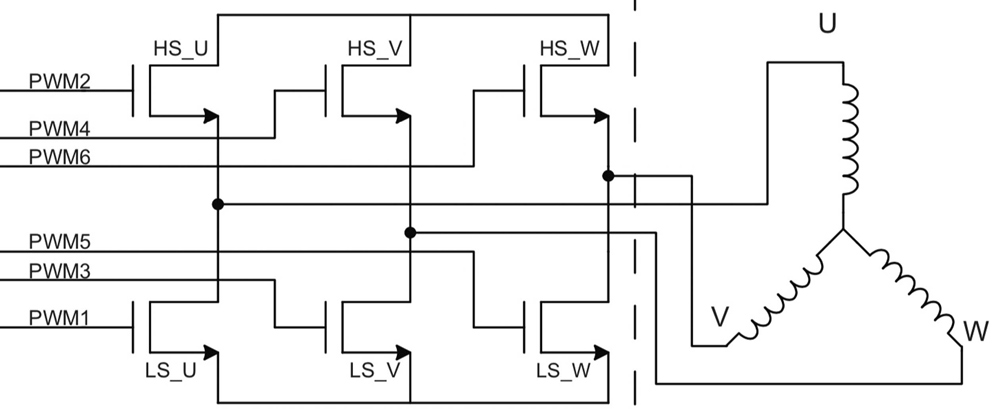
1. ábra A digitális háromfázisú szénkefe nélküli egyenáramú (BLDC) motorok vezérlőegysége általában három pár MOSFET-et tartalmaz, mindegyik pár a villanymotor egy-egy tekercsét látja el váltakozó gerjesztőfeszültséggel (A kép forrása: Texas Instruments)
Jobb villanymotorok készítése
A villanymotorok kialakítása a hatásfok és a helytakarékosság jelentette kettős kereskedelmi nyomás következtében gyorsan fejlődött. A digitális vezérlésű, szénkefe nélküli egyenáramú villanymotorok a fejlődés egyik irányát jelentik. A motor népszerűségének oka az elektronikus kommutáció használata, amely magasabb hatásfokot kínál a hagyományos (szénkefés kommutációjú) egyenáramú motorokhoz képest, ez az ugyanakkora fordulatszámú és terhelésű villanymotorokhoz képest 20–30% hatásfokjavulást jelent.
A továbbfejlesztés lehetővé teszi kisebb méretű, könnyebb és csendesebb szénkefe nélküli egyenáramú motorok gyártását azonos leadott teljesítmény mellett. A szénkefe nélküli egyenáramú motorok egyéb előnyei közé tartozik a kiváló fordulatszám-nyomaték karakterisztika, a dinamikusabb reagálás, a halk működés és a nagyobb fordulatszám-tartomány. A mérnökök arra is törekszenek, hogy nagyobb feszültségen és frekvencián működő motorokat hozzanak létre, mert ez lehetővé teszi, hogy egy kis méretű villanymotor elvégezze ugyanazt a munkát, amit egy nagyobb méretű hagyományos villanymotor.
A szénkefe nélküli egyenáramú motorok sikerének kulcsa az elektronikus kapcsolóüzemű tápegység és a motorvezérlő áramkör, amely a háromfázisú bemenőjelet szolgáltatja. A háromfázisú bemenőjel forgó mágneses mezőt hoz létre, amely forgatja a forgórészt. Mivel a mágneses mező és a forgórész ugyanazzal a sebességgel forog, a villanymotor szinkronmotornak minősül. A Hall-érzékelők úgy kapcsolják át az állórész és a forgórész egymáshoz képesti helyzetét, hogy a vezérlőegység a megfelelő pillanatban tudja átváltani a mágneses mezőt. Rendelkezésre állnak az elektromotoros ellenerőt figyelő „érzékelő nélküli” műszaki megoldások is, amelyek ahhoz szükségesek, hogy meg lehessen határozni az állórész és a forgórész helyzetét.
A háromfázisú, szénkefe nélküli egyenáramú motorok esetében az áramot sorrendben átkapcsoló szerkezet kialakítása leggyakrabban három pár hídba kapcsolt teljesítmény-MOSFET-et tartalmaz. Mindegyik pár inverterként működik, amely átalakítja a tápegységből kapott egyenfeszültséget a motor tekercsének gerjesztéséhez szükséges váltakozó feszültséggé (1. ábra). A nagyfeszültségű berendezésekben általában szigetelt kapus bipoláris tranzisztorokat (IGBT) használnak a MOSFET-ek helyett.
A tranzisztorpár egy (a földre kapcsolt forrású) alacsony oldali és egy (a föld és a nagyfeszültségű tápáramköri sín között lebegő forrású) magas oldali tranzisztorból áll.
Egy jellegzetes kialakításban a MOSFET-ek kapuját impulzusszélesség-modulációval (PWM) vezérlik, amely jó hatásfokkal alakítja át az egyenfeszültséget modulált gerjesztőfeszültséggé. Legalább egy nagyságrenddel magasabb frekvenciájú impulzusszélesség-modulációt kell használni, mint amennyinek a várható legnagyobb motorfordulatszámnak lennie kell. Mindegyik MOSFET-pár a villanymotor egy fázisának mágneses mezejét vezérli.
(A szénkefe nélküli egyenáramú motorok vezérléséről bővebb információval szolgál a "How to Power and Control Brushless DC Motors" – A szénkefe nélküli egyenáramú motorok áramellátása és vezérlése című cikk.)

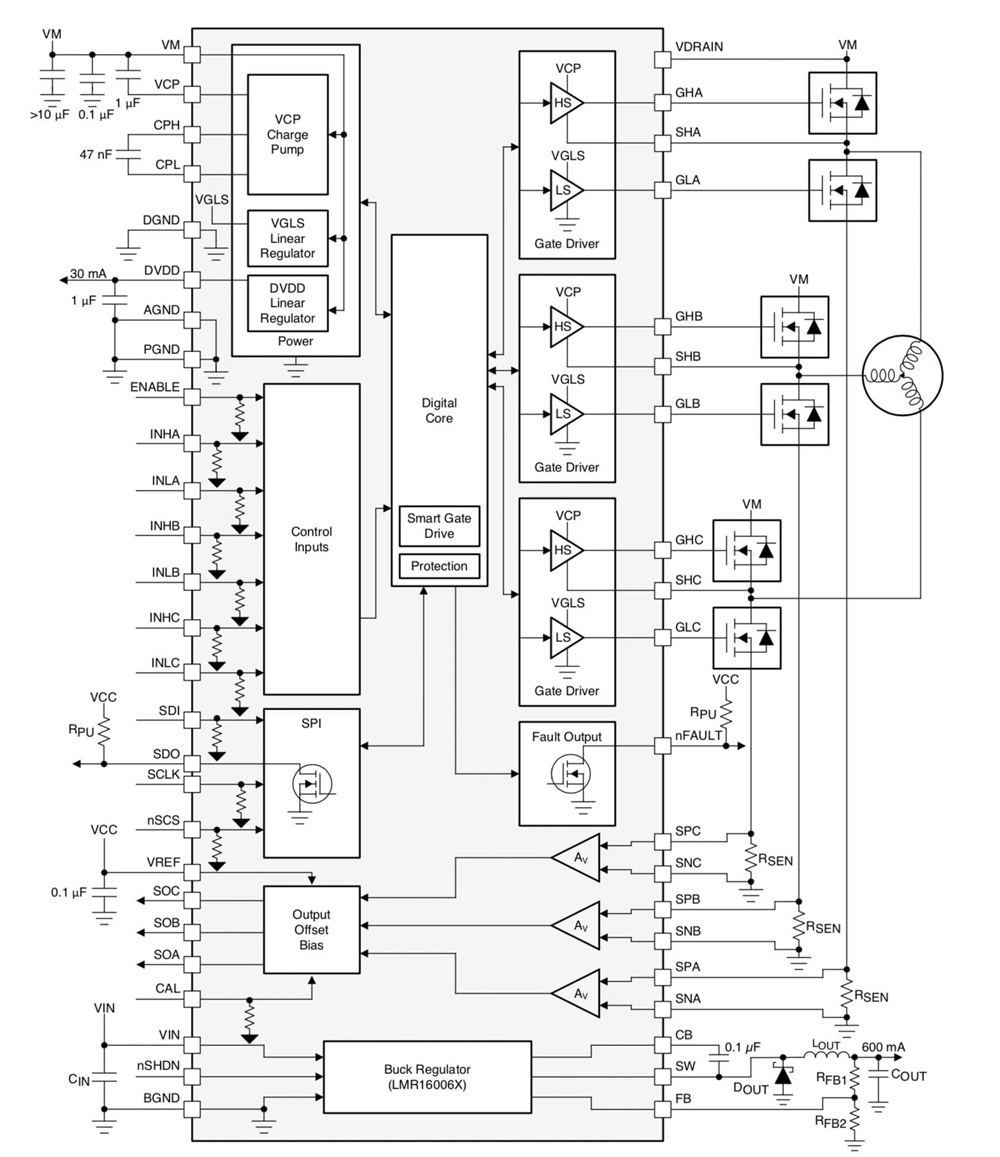
2. ábra A TI MSP 430 mikrovezérlőre épülő, szénkefe nélküli egyenáramú (BLDC) motor blokkvázlata (A kép forrása: Texas Instruments)
Az elektronikus motorvezérlő rendszer
A villanymotor teljes motorvezérlő rendszere egy tápegységből, egy saját mikrovezérlőből, egy kapuvezérlőből és félhíd elrendezésbe kapcsolt MOSFET-ekből áll (2. ábra). A mikrovezérlő állítja be az impulzusszélesség-moduláció munkaciklusát, és felügyeli a nyitott hurkú vezérlőegységet. Kisfeszültségű kialakítások esetén a kapuvezérlő és a MOSFET-híd néha egy egységbe van összeépítve. A nagy teljesítményű berendezések esetén azonban a kapuvezérlő és a MOSFET-híd el van választva egymástól, hogy könnyebb legyen a hőelvezetés, lehetőség legyen eltérő jelfeldolgozó technikák alkalmazására a kapuvezérlő és a híd esetében, és minimálisra lehessen csökkenteni az elektromágneses zavarokat.
A MOSFET-híd készülhet diszkrét elemekből és integrált lapkaként is. Az alacsony és magas oldali MOSFET egyazon tokba építésének egyik fő előnye, hogy lehetővé teszi a természetes hőkiegyenlítést a felső és alsó MOSFET-ek között, akkor is, ha azoknak különböző az energiavesztesége. Akár integrált, akár diszkrét elemekről van szó, mindegyik tranzisztorpár független kapuvezérlőt igényel a kapcsolásidőzítés és a gerjesztőáram szabályozására.
A kapuvezérlő áramkört is meg lehet tervezni diszkrét alkatrészekből is. Ennek a megoldásnak az az előnye, hogy lehetővé teszi a mérnökök számára a kapuvezérlő pontos beállítását a MOSFET jelleggörbéje alapján, valamint a teljesítmény optimalizálását. A hátránya pedig az, hogy magas szintű villanymotor-tervezési tapasztalatokat kíván, valamint helyre van szükség a diszkrét alkatrészek elhelyezéséhez.
A modulrendszerű villanymotor-vezérlő megoldások alternatívát kínálnak, és a piacon számos integrált áramkörös kapuvezérlő kapható. A jobb modulrendszerű kapuvezérlő megoldások jellemzői a következők:
-
magas integráltsági fok az eszköz helyigényének minimálisra csökkentése érdekében,
-
nagy gerjesztőáram a kapcsolási veszteségek csökkentése és a hatásfok növelése érdekében,
-
magas kapuvezérlő feszültség annak biztosításához, hogy a MOSFET minimális belső ellenállással vezessen (RDS_ON),
-
magas szintű túlmelegedés, túláram és túlfeszültség elleni védelem, hogy a várható legrosszabb esetekben is megbízhatóan működjön a rendszer.
3. ábra Nagy integráltsági fokú kapuvezérlőket használva, mint a TI DRV8323R, csökkenthető a rendszert alkotó alkatrészek száma, a rendszer ára és bonyolultsága, miközben kisebb helyet is igényelnek (A kép forrása: Texas Instruments)
Az olyan eszközök, mint a Texas Instruments DRV8323x háromfázisú kapuvezérlő termékcsaládja, csökkentik a rendszert alkotó alkatrészek számát, a rendszer árát és bonyolultságát, miközben megfelelnek a nagy hatásfokú, szénkefe nélküli egyenáramú motorok támasztotta követelményeknek.
A DRV8323x termékcsalád három változatban kapható. Mindegyik három független kapuvezérlőt tartalmaz integrált formában, amelyek képesek a magas oldali és alacsony oldali MOSFET-pár vezérlésére. A kapuvezérlők tartalmaznak egy töltésszivattyút, hogy létrehozzák a nagyfeszültséget (akár 100%-os munkaciklus-támogatással) a magasoldali átmenethez és egy lineáris szabályozót az alacsony oldali tranzisztorok támogatására.
A TI kapuvezérlői érzékelőerősítőket is tartalmaznak, amelyek beállíthatók úgy, hogy szükség esetén feszültséget erősítsenek az alacsony oldali MOSFET-eken keresztül. Az eszközök maximum 1 A áramot tudnak kiadni, a kapuvezérlő kimenet befolyó csúcsárama 2 A, és az eszköz egyetlen tápegységről üzemel, amelynek tápfeszültsége 6 V és 60 V között változhat.
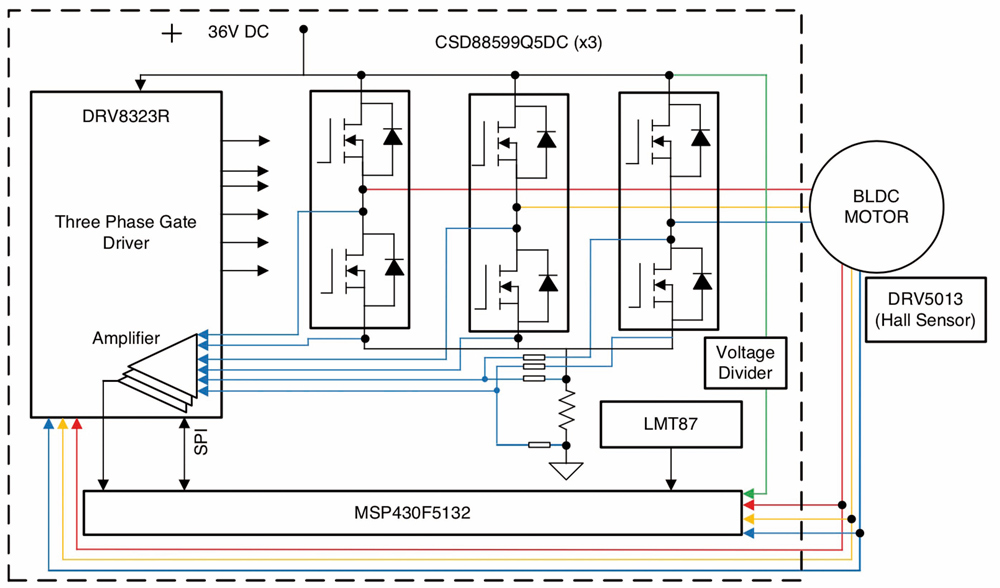
4. ábra A TIDA-01485 egy 1 kW teljesítményű, 99%-os hatásfokú referenciaterv háromfázisú, 36 V-os, szénkefe nélküli egyenáramú (BLDC) villanymotorhoz, amely tízcellás lítiumionos akkumulátorról működtethető (A kép forrása: Texas Instruments)
A DRV8323R változat például három kétirányú áramérzékelő erősítőt tartalmaz, amelyek az egyes MOSFET-hidakon átfolyó áram erősségét érzékelik egy alacsony oldali söntellenállást használva. Az áramérzékelő erősítő erősítési tényezőjét soros perifériaillesztőn (SPI) vagy hardveres illesztőeszközön át lehet beállítani. A mikrovezérlő a DRV8323R eszköz EN_GATE lábához van kapcsolva, hogy engedélyezni tudja vagy le tudja tiltani a kapuvezérlő kimeneteit.
A DRV8323R tartalmaz még egy 600 mA-es egyenáramú feszültségszabályozót is, amelyet külső vezérlőegység áramellátására lehet használni. Ez a feszültségszabályozó használhatja a kapuvezérlő tápegységét, de saját tápegységet is (3. ábra).
A kapuvezérlők a védelmek széles körét tartalmazzák, ilyenek például a tápegység feszültségesés miatti letiltása, a töltésszivattyú feszültségesés miatti letiltása, a túláramvédelem, a kapuvezérlő rövidzár-érzékelése és a túlmelegedés esetén történő kikapcsolás.
Mindegyik DRV832x eszköz 5 × 5 vagy 7 × 7 mm-es tokba van építve (a belső kialakítástól függően). A termékek helytakarékosak, ami több mint 24 diszkrét alkatrész esetén elvárás lenne.
Tervezés integrált kapuvezérlők használatával
Annak érdekében, hogy versenyképesen tartsa a tervezőket, a TI kínál egy referenciatervet, a TIDA-01485 jelűt. Ez egy 99%-os hatásfokú, 1 kW referencia-teljesítményszintű, 36 V-os, szénkefe nélküli egyenáramú (BLDC) villanymotor, amely például tízcellás lítiumionos akkumulátorról működő szerszámgépekben használható.
A referenciaterv megmutatja, hogyan lehet takarékoskodni a hellyel nagy integráltsági fokú kapuvezérlőket, például a DRV8323R jelűt használva a villanymotorok vezérlésének tervezésénél az ezen a teljesítményszinten legkisebb motorvezérlő áramkör alapját kialakítva. A referenciaterv érzékelőalapú vezérlést valósít meg. (Elolvasható a „Why and How to Sinusoidally Control Three-Phase Brushless DC Motor?” – Miért érdemes és hogyan lehet szinuszjellel vezérelni a háromfázisú, szénkefe nélküli egyenáramú motorokat? című cikkben).
A referenciaterv fő eleme egy MSP430F5132 mikrovezérlő, a DRV8323R kapuvezérlő és három félhídba kapcsolt 60 V-os CSD88599 típusú MOSFET teljesítményblokk (4. ábra).
Miközben a kapuvezérlő egy nagy integráltsági fokú modulrendszerű megoldás, amely kiküszöböli a diszkrét elemekkel kialakított áramkörök bonyolultságának jó részét, még mindig marad némi tervezői munka, amelyet a teljesen működőképes rendszer kialakításához el kell végezni. A referenciaterv segít a tervezőknek kidolgozni egy prototípust azzal, hogy egy átfogó megoldást mutat be.
Például a kapuvezérlő több leválasztó kondenzátort igényel a helyes működéshez. A referenciaterven egy 1 μF-os kondenzátor (C13) választja le az alacsony oldali MOSFET vezérlőfeszültségét (DVDD), amelyet a DRV8323R belső lineáris feszültségszabályozója szolgáltat (5. ábra). Ezt a kondenzátort a lehető legközelebb kell elhelyezni a kapuvezérlőhöz, hogy minimálisra csökkenjen a hurokellenállás. Egy másik, 4,7 μF-os leválasztó kondenzátorra (C10) van szükség a 36 V-os akkumulátorról származó egyenfeszültségű tápfeszültség-bemenet (PVDD) leválasztásához.
A D6 dióda segít leválasztani a kapuvezérlő tápegységét abban az esetben, ha az akkumulátor feszültsége rövidzár miatt leesne. Ez a dióda azért fontos, mert megléte lehetővé teszi a PVDD leválasztó kondenzátora (C10) számára a bemenő feszültség szintjének tartását rövid idejű feszültségesések esetén.
A feszültség szinten tartásával megelőzhető, hogy a kapuvezérlő nem kívánt feszültségesés miatti letiltási állapotba kerüljön. A C11 és a C12 a töltésszivattyú működéséhez kulcsfontosságú, és szintén a lehető legközelebb kell őket elhelyezni a kapuvezérlőhöz.
Általában jó tervezési módszer a hurkok minimálisra csökkentése a magas és az alacsony oldali kapuvezérlőknél is, elsősorban az elektromágneses zavarok csökkentése érdekében. A magas oldali hurok a DRV8323 GH_X lába és a teljesítmény-MOSFET között képződik, és az SH_X lábon zárul. Az alacsony oldali hurok a DRV8323 GL_X lába és a teljesítmény-MOSFET között képződik, és a GND (föld) lábon zárul.
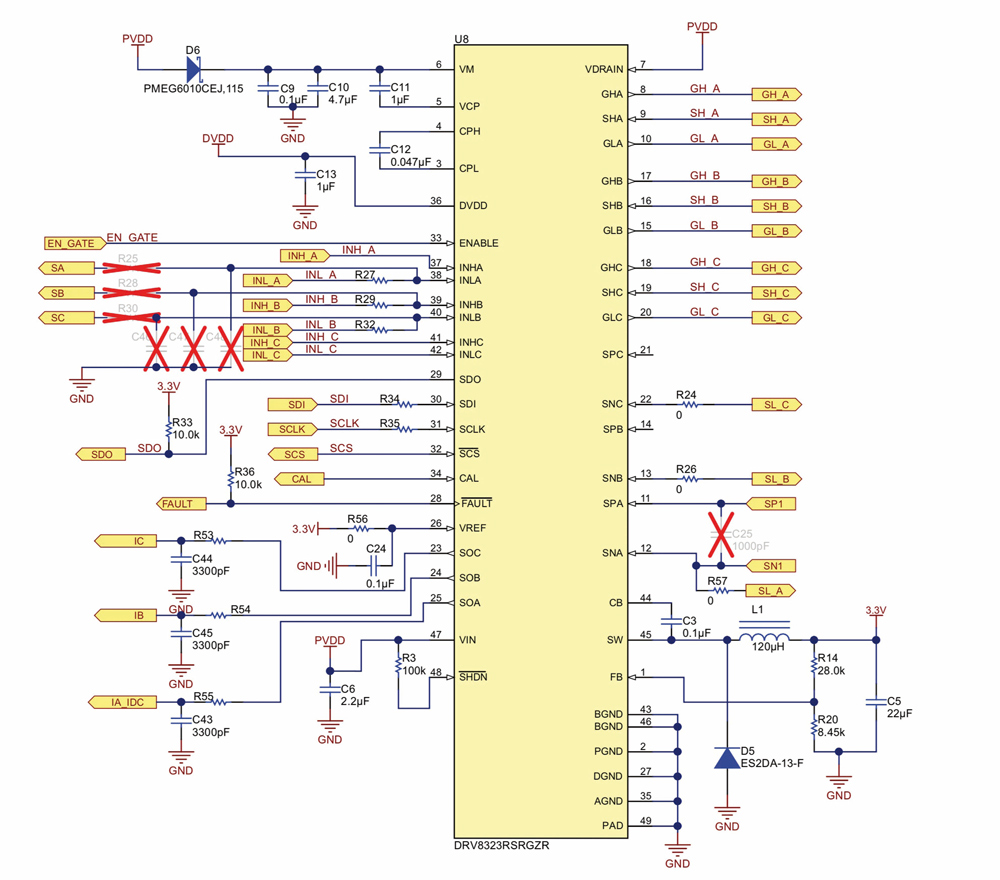
5. ábra A DRV8323R kapuvezérlő használata valós készülék áramkörében. A csíkok hosszát minimálisra kell csökkenteni az elektromágneses zavarás minél kisebbre csökkentése érdekében (A kép forrása: Texas Instruments)
A kapcsolás időzítésének fontossága
A MOSFET-ek kiválasztása kulcsfontosságú a szénkefe nélküli egyenáramú motorok teljesítménye és hatásfoka szempontjából. Mivel nincs két teljesen egyforma MOSFET-termékcsalád, a választás alapját a szükséges kapcsolásidőzítés szabja meg. Ha csak kis mértékben is rossz az időzítés, az különféle problémákat okozhat a hatásfok romlásától a magasabb elektromágneses zavarokon át az esetleges motorhibákig bezárólag.
A hibás időzítés okozhat például átütést, olyan állapotot, amikor az alacsony és a magas oldali MOSFET is egyszerre nyit ki, ami katasztrofális rövidzárat idéz elő. Egyéb időzítési problémák még a parazitakapacitás miatti áramlökések (tranziensek), amelyek tönkretehetik a MOSFET-eket. Problémákhoz vezetnek a külső rövidzárak, ónhidak is, és az, hogy a MOSFET valamelyik állapotában ragad.
A TI a DRV8323 jelű eszközeit „intelligens” kapuvezérlőknek nevezi, mert lehetővé teszik a tervezők számára az időzítés szabályozását, valamint visszacsatolással ezen problémák kivédését. A vezérlőben található például egy belső állapotfigyelő egység, amely véd a kapuvezérlőn belüli rövidzárak ellen, szabályozza a MOSFET-híd holtidejét (tDEAD), valamint véd az ellen, hogy a parazitakapacitások kinyissák a külső teljesítmény-MOSFET-et.
A DRV8323 kapuvezérlő tartalmaz egy szabályozható ellenütemű elrendezést is úgy az alacsony, mint a magas oldali vezérlőknél, ami lehetővé teszi a külső MOSFET-híd erős felfelé és lefelé való elhúzását is a szórt kapacitások okozta problémák elkerülése érdekében. A szabályozható kapuvezérlők támogatják a kapuvezérlő áramerősségének (IDRIVE) és vezérlési időtartamának (tDRIVE) menet közbeni módosítását is (anélkül, hogy szükség lenne áramkorlátozó ellenállásokra a kapuvezérlőnél), hogy finoman be lehessen állítani a rendszer működését (6. ábra).
Az IDRIVE és a tDRIVE értékét kezdetben a külső MOSFET-ek jelleggörbéje, például a kapu és a forrás közti kapacitás és a kívánt felfutási (nyitási) és lefutási (zárási) idők alapján kell kiválasztani. Ha például az IDRIVE értéke túl alacsony, a MOSFET-ek felfutási és lefutási ideje hosszabb lesz, ami magas kapcsolási veszteségeket eredményez. A felfutási és lefutási idő (bizonyos mértékig) meghatározza az egyes MOSFET-ek szabadonfutó diódája nyitási áramlökésének energiáját és időtartamát, ami szintén csökkentheti a hatásfokot.
A kapuvezérlő állapotának megváltoztatásakor az IDRIVE erősségű áram tDRIVE ideig van ráadva a vezérlőre, ennek elég hosszú időnek kell lennie ahhoz, hogy a kapu kapacitásai teljes mértékben feltöltődjenek vagy kisüljenek. Ökölszabály, hogy nagyjából kétszer olyan hosszú tDRIVE időt kell választani, mint a MOSFET-ek kapcsolási felfutási (nyitási) és lefutási (zárási) ideje. A tDRIVE nem növeli az impulzusszélesség-moduláció (PWM) időtartamát, és megszakad, ha működési ideje alatt PWM parancs érkezik.
A tDRIVE időszak után egy állandó értékű tartóáram (IHOLD) folyik, amely a kívánt (felső, azaz nyitott vagy alsó, azaz zárt) állapotban tartja a kaput. Amikor a magas oldal ki van nyitva, az alacsony oldali MOSFET kapura erős zárófeszültség hat, hogy a tranzisztor kapu és forrás közti kapacitása ne tudja kinyitni a tranzisztort.
Az állandó tDRIVE idő biztosítja, hogy hiba, például a MOSFET kapuján fellépő rövidzár esetén korlátozott ideig hat csak a csúcsáram. Ezek a határértékek korlátozzák az átvitt energiát, és megakadályozzák a kapuvezérlő lábainak és a tranzisztornak a károsodását.
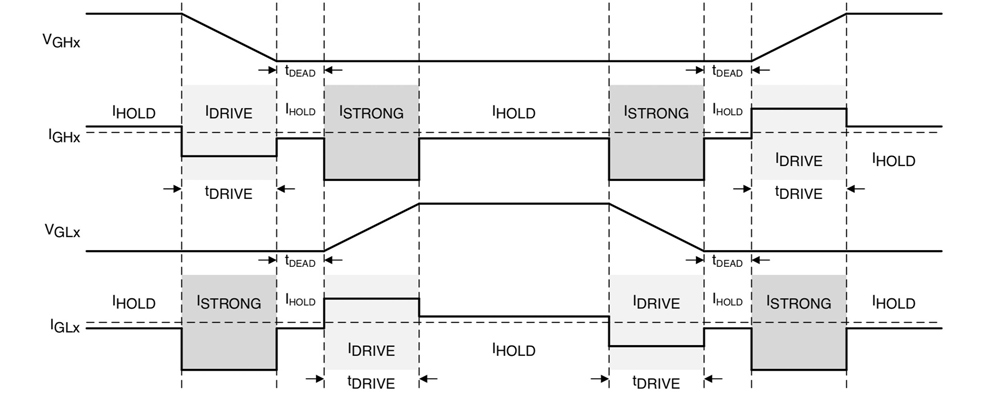
6. ábra Háromfázisú, szénkefe nélküli egyenáramú (BLDC) motor egyik MOSFET-hídjának magas oldali (VGHx) és alacsony oldali (VGLx) tranzisztorok bemenő feszültség- és áramértékei. Az IDRIVE és a tDRIVE értéke a villanymotor működése és hatásfoka szempontjából fontos, a IHOLD a kapunak a kívánt állapotban tartására használható, míg az ISTRONG megakadályozza, hogy az alacsony oldali tranzisztor kapu és forrás közti kapacitása kinyithassa a tranzisztort (A kép forrása: Texas Instruments)
Következtetés
A modulrendszerű villanymotor-vezérlő egységek helytakarékosak, mert szükségtelenné tesznek több tucatnyi diszkrét alkatrészt, és tovább növelik a kis méretű, digitálisan vezérelt, nagy teljesítménysűrűségű, szénkefe nélküli egyenáramú (BLDC) villanymotorok előnyeit. Ezek az „intelligens” kapuvezérlők olyan műszaki megoldásokat is tartalmaznak, amelyek megkönnyítik a MOSFET-es kapcsolásidőzítés sok fortélyt igénylő fejlesztési folyamatát, miközben csökkentik a parazitakapacitások hatását és az elektromágneses zavarokat.
Ennek ellenére továbbra is oda kell figyelni a külső áramköri elemek, például a teljesítmény-MOSFET-ek és a leválasztó kondenzátorok gondos megválasztására. De mint látható, a villanymotorok vezérlésének fejlesztésével foglalkozó nevesebb cégek kínálnak olyan referenciaterveket, amelyek alapján a tervezők kifejleszthetik saját prototípusaikat.
Szerző: Rich Miron – Digi-Key Electronics
Digi-Key Electronics
Angol/német nyelvű kapcsolat
Hermann W. Reiter
Director, Global Strategic Business Development
Digi-Key Electronics Germany
Tel.: +49 151 6286 5934
E-mail: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
www.digikey.hu
Még több Digi-Key Electronics














