



Az MCU-k igazodnak a motorvezérlés és az alkalmazások változásaihoz
 A motor kialakításának és az alkalmazási céloknak a megválasztása erősen befolyásolja a vezérlőstratégiát, és ezáltal az annak megvalósítására szolgáló elektronikai platformot.
A motor kialakításának és az alkalmazási céloknak a megválasztása erősen befolyásolja a vezérlőstratégiát, és ezáltal az annak megvalósítására szolgáló elektronikai platformot.
A motoroknak számos fajtája ismeretes. A spektrum igen széles a precíziós pozicionálásra gyakran használt léptetőmotoroktól kezdve az ipari keveréshez és feldolgozáshoz alkalmazott, nagy méretű váltakozóáramú indukciós (ACI) motorokig.
A motorfajta megválasztását nagyon gyakran nemcsak az alkalmazás, hanem a környezete is meghatározza. Autóipari környezetben például a váltakozóáram helyett a kisfeszültségű, egyenáramú, akkumulátorról táplált működésre van szükség. Ezt a kefés DC (Brushed DC – BDC), a kefe nélküli DC (Brushless DC – BLDC) és az állandó mágneses szinkron (Permanent Magnet Synchronous – PMS) motorok használata képes biztosítani.
A hálózati táplálású berendezések, mint például a mosógépek és ipari gépek, olyan ACI-felépítésű motorkialakítást alkalmaznak, amely közvetlenül használható a 110 vagy 220 V-os, vagy annál nagyobb feszültségű váltakozóáramú energiaforrásról. Ugyanakkor az ipari felhasználók még a nagyobb feszültségű háromfázisú tápegységekhez való hozzáférés esetén is előnyben részesíthetik a nagyfeszültségű BLDC vagy PMS (1. ábra) motorokat rendszerükben, mivel alacsony fordulatszámon eleve nagyobb nyomatékot kínálnak az ACI-motoroknál.

1. ábra Az ipari alkalmazásokban elterjedten alkalmazzák az állandó mágneses szinkron (PMS) motorokat, mivel működési elvükből következően nagyobb nyomatékot kínálnak alacsonyabb fordulatszámon is
Ennek eredményeként a motor kialakítása és az alkalmazási célok megválasztása erősen befolyásolja a vezérlési, szabályozási stratégiát, és ezen keresztül az annak megvalósításához használt elektronikai platformot. A legegyszerűbb motorvezérlés nem más, mint a kapcsoló vagy a feszültségszabályozó. Az ACI motoroknál az egyszerű tervezés közös stratégiája a motorra megadott, optimális „Volt/Hertz” érték lehető legjobb közelítése. (Egy adott ACI-motornál az optimális V/Hz-aránytól való eltérés a motor nyomatékának, melegedésének, fordulatszámának, zajának vagy áramfelvételének kedvezőtlen változásához vezethet – A ford. megj.) Ez a módszer azonban alacsony fordulatszámnál csak alacsony forgatónyomaték előállítását teszi lehetővé, ami sok alkalmazásban elfogadhatatlan.
Bonyolultabb vezérlési stratégiákra való áttéréssel a tervezők egy adott motortípus sok hiányosságát képesek ellensúlyozni. Például annak ellenére, hogy a léptetőmotor rögzített lépésekben történő mozgásra van tervezve, a „mikroléptetés” (microstep) néven ismert fejlett vezérlési technikák nagy felbontású pozicionálást vagy pontos folyadékszállítási térfogatsebességet eredményezhetnek.
A magas minőségű mezőorientált vezérlés (Field Oriented Control – FOC)-stratégiák a motoron belüli fluxus matematikai modellezésével határozzák meg, hogy pontosan mikor kell bekapcsolni a motor valamelyik fázisát. A FOC megoldja a motorvezérlés számos olyan problémáját, amelyek a kevésbé kifinomult stratégiákat használó vezérléstípusokra (például a V/Hz-alapú vezérlésekre) jellemzők. A FOC nagy nyomatékot garantál széles fordulatszám-tartományban, és az az előnye, hogy drága érzékelők nélkül is nagy pontosságú pozicionálásra képes: a motortekercs áramának mérése biztosítja az információt a matematikai modell számára, amely a rotornak az állórésztekercseihez viszonyított helyzetét határozza meg.
A többtengelyes robotok és a számítógépes-numerikus vezérlésű (CNC) gépeknek a legmagasabb pontossági és pontossági követelményeket kielégítő pozicionálásra van szükségük, amelyet gyakran különféle motortípusok kombinációjával valósítanak meg. A magas minőségi követelmények teljesítéséhez a tervezők gyakran nagy sebességű digitális jelfeldolgozókat (DSP-ket) vagy akár programozható logikai hálózatokat (FPGA-kat) használnak. Ezek a vezérlők képesek egyidejűleg összehangolni több motor tevékenységét a robotkarok és a szerszámgépek pontos útvonalakon történő mozgatása érdekében, a pozíciókódolók által meghatározott helyzetinformáció visszacsatolásával.
A motorvezérlés kialakítását befolyásoló számos tényező között van egy hosszú távú tendencia: az energiahatékonyság iránti igény, különösen azoknál a rendszereknél, amelyeknek folyamatosan vagy hosszú ideig kell működniük. Azonkívül, hogy ennek érdekében FOC-alapú módszereket alkalmaznak a motor belső hatásfokának javítására, a fejlett algoritmusokkal magasabb hatásfok érhető el a kimeneti teljesítményszint valós idejű beállításával ahelyett, hogy a motort állandó sebességgel működtetnék. Ezenfelül a megbízhatóság és a költség fontos kritériumok, amelyek megkönnyítik a motor típusának meghatározását. Ezek a megfontolások is befolyásolják mind a mikrovezérlő egységek (MCU), mind a motorok kiválasztását.
A tervezőcsapatok most kezdik el alkalmazni az állandó mágnessel támogatott szinkron reluktanciamotorokat (Permanent Magnet-assisted Synchronous Reluctance – PMASR) és a belső mágneses (Internal Permanent Magnet – IPM) motorokat a háztartási készülékekben és az autóiparban, különösen a légkondicionálóknál és a hűtőkompresszoroknál. Igaz, ezek a motorok drágábbak a hagyományos PMS-konstrukcióknál, de nagyobb az energiahatékonyságuk. Az IPM-alapú motorokra való áttérés a vezérlőszoftver további bővítését igényli, amely javítja az alapvető FOC-algoritmusok működését. A legfontosabb kiegészítések az 1 A áramfelvételre vonatkoztatott maximális nyomaték (Maximum Torque Per Ampere – MTPA) algoritmus és egy szögkövető fázisszinkronhurok (Angle-Track Phase-Locked Loop – AT-PLL)-alapú becslés használata.
Bár a motorok kialakításának számos formája létezik, és mindegyikük saját külön vezérlőalgoritmust igényel, mégis a motor tekercseinek illesztésére gyakran ugyanazokat a hardverperifériákat használják. A motorvezérléshez optimalizált mikrovezérlők (MCU-k) és digitális jelvezérlők (DSC-k) gyakran tartalmaznak különféle intelligens, a különféle processzorarchitektúráktól függetlenül egységes perifériakombinációkat. A motorvezérlő MCU-knak hardveres támogatást kell nyújtaniuk az impulzusszélesség-modulációhoz (PWM) és a holtidő beillesztéséhez. Ezek a funkciók kezelik azt a számos kapcsolási eseményt, amelyek közvetlen szoftverbeavatkozások nélkül is pontosan kapcsolják rá a szükséges teljesítményt a motor tekercseire. Ez csökkenti azoknak a programmegszakításoknak a számát, amelyet a processzormagnak motorfordulatonként kell lekezelnie.
Számos rendszerben további követelmény egy pontos 10 vagy 12 bites A/D-átalakító. Az analóg-digitális (A/D) átalakítóval mérik a motor visszacsatolt fázisfeszültségét, továbbá ezeket használják a túl magas vagy túl alacsony feszültségű állapotok felismerésére. Egyes megoldásokban műveleti erősítőt iktatnak be jelkondicionálóként az A/D-konverter elé a motor fázisáram-visszacsatolásához szükséges mérés elvégzéséhez. Az integrált műveleti erősítővel ellátott MCU-k, valamint az analóg küszöbérték-érzékelő komparátorok csökkentik az alkatrészek számát a nyomtatott áramköri lapon. Azok az integrált egységek, amelyek a teljesítménykapcsoló MOSFET-ek kapumeghajtóit is tartalmazzák az MCU/DSC tokozatán belül, ugyancsak csökkentik a NyÁK-területet, ami különösen fontos lehet például az autóiparban és az elektromos kéziszerszámgyártásban.
Egy PWM vezérlőkkel kiegészített 8 bites mikrovezérlő sokféle alacsony teljesítményű motorvezérlési alkalmazás igényeit képes kielégíteni. Ha azonban nagyobb számítási képességre van szükség, akkor gyakran tanácsos áttérni egy 16 bites architektúrán alapuló, hasonló vezérlőeszközre. Például, ha a zárt hurkú vezérlőszoftvernek feszültség-visszacsatolást és az A/D-átalakító által mintavételezett egyéb jeleket kell feldolgoznia, akkor az aritmetikai műveletek 8 bites szegmensekre tördelése visszafoghatja a teljesítményt. Az ilyen helyzetekben előnyös 16 bites MCU-t vagy DSC-t választani azzal a kiegészítéssel, hogy a DSC még nagyobb számítási teljesítménnyel hajtja végre a kifinomult vezérlőalgoritmusokat.
Az innovatív motorvezérlő stratégiákhoz, amelyek már összetett matematikai modelleket igényelnek a pályák és a mozgási profilok kiszámításához, célszerű áttérni az olyan 32 bites architektúrákra, mint például az Arm® Cortex™–M . A Cortex™–M4, vagy a hozzá hasonló képességű más processzormagok támogatják a lebegőpontos aritmetikát, amely lehetővé teszi a magas szintű matematikai szoftvereszközökkel, például a Matlab-bal kifejlesztett kód egyszerű konvertálását az alkalmazásprocesszorra.
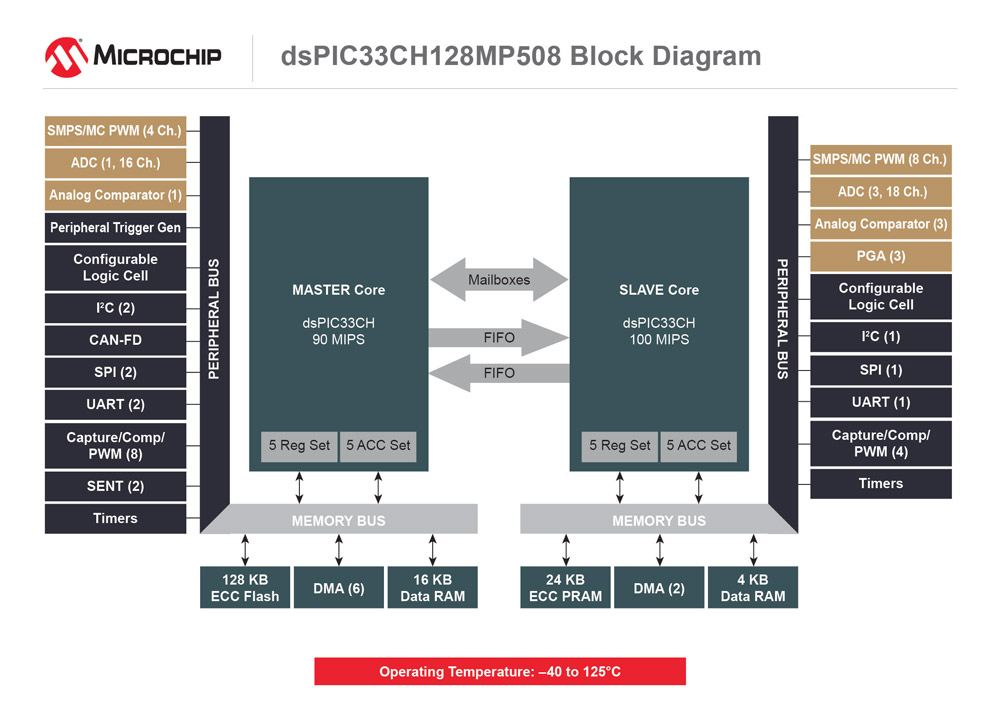
2. ábra A dsPIC33CH digitális jelvezérlő (DSC)-család tömbvázlata
A Microchip olyan szoftvert vezetett be, amely megkönnyíti az összetett FOC-algoritmusok adaptációját. A Microchip MotorBench Development Suite (mB) eszközöket kínál a BLDC vagy PMS motorok tervezéshez szükséges villamos és mechanikai paramétereinek kiválogatásához, és egy FOC algoritmus bemeneteként használja azokat, amellyel a felhasználó elvégezheti a motor kezelésére használt három vezérlőhurok hangolását. A vezérlőhurkok és az algoritmus más paramétereinek meghatározása után a szoftvereszköz generálja az MPLAB X integrált fejlesztőkörnyezet használatával tovább feldolgozható szoftverprojektfájlt. Az mB 2.0-ban nemrégiben jelent meg az alacsony feszültségű motorokhoz már létező finomhangolási képességeken kívül a 600 V-os feszültségű motorok támogatása is.
Noha a motorvezérléshez szükséges perifériák általában sokféle alkalmazásban egységesen használhatók maradnak, a rendszertervek egyre növekvő komplexitásának kezeléséhez az MCU-k és a DSC-k több változata szükséges. A hálózati támogatás ma alapkövetelmény az autóiparban, a háztartási automatizálásban és az ipari vezérlőrendszerekben. Sok rendszernél fontos értékesítési szempont ugyanis az a képesség, hogy az eszköz nemcsak felhasználási és hibaadatokat küldhet az irányítástechnikai rendszereknek, hanem lehetővé teszi a rendszerelemek távvezérlését is.
Mindegyik ipari szektornak megvan a saját preferált hálózati protokollja, amely viszont befolyásolja a perifériák kiválasztását. Az autóipari alrendszerekhez általában olyan interfészekre van szükség, mint például a LIN vagy a CAN-FD. Az ipari rendszerek használhatják az Ethernet-et vagy az EtherCAT-ot, továbbá a vezetékmentes megoldásokat, amelyek egyre általánosabbá válnak az IoT környezetbe történő integráció során. A hálózati támogatás gyakran jelentősen megnövelheti a programkód tárolókapacitás-igényét, így a 256 vagy az 512 kbájt tartományba is emelkedhet a chip-re integrált flashmemória terjedelme. A kommunikációs szolgáltatások működéséhez általában nagyobb terjedelmű RAM-tárolóra is szükség van. Az önálló – kommunikációt nem igénylő – motorvezérlő alkalmazásokhoz azonban hagyományosan 32 kbájt vagy annál kevesebb flashprogramtároló is elegendő.
Az olyan piacok, mint az ipari irányítástechnika és az autóipar, szigorú követelményeket támasztanak a funkcionális biztonság szempontjainak megfelelően is. A rendszertervezőknek eleget kell tenniük az IEC 60137 B osztály és az ISO 26262 szabványoknak. A hibadetektálási és -javító képességekkel rendelkező memóriavezérlők, valamint a programfutás-figyelő (watchdog) és az aktivitás hiányát jelző (dead-man) időzítők, továbbá a tápellátás és az órajelfigyelő alrendszerei gondoskodnak arról, hogy az MCU-k megfelelhessenek ezeknek a szabványoknak. A tervezők felhasználhatják a DSC architektúrájának fejlődését is a megbízhatóság és biztonság további javítására. Ha a rendszer két processzormagot használ, akkor az egyes magokon futó szoftverek ellenőrizhetik a másik viselkedését, és figyelmeztethetnek a problémákra, vagy újraindítást kezdeményezhetnek, ha a végrehajtás ismeretlen okból leáll.
A kétmagos felépítés előnyei másként is kihasználhatók. A munkaterhelést két független processzoron megosztva a tervezők egyszerűsíthetik a valósidejű motorvezérlő szoftverek integrálását más funkciókkal, például a hálózati kommunikációval az IoT-orientált készülékekben. Az ilyen felhasználásokat is támogatja a motorvezérlésre optimalizált, kétmagos dsPIC33CH DSC-családja.
Ezekben az eszközökben két dsPIC mag van ugyanzon tokozatban. Az egyik egy vezérlőprocesszor-mag (master), a másik egy alárendelt (slave) mag. Önmagában a slave-mag számítási képessége két háromfázisú motor vezérléséhez is elegendő. A master processzormag önállóan vezérelhet egy további háromfázisú motort és a rendszermenedzsmentet, a hálózati kommunikációt és egyéb funkciókat, mint például a nagy teljesítményű alkalmazások teljesítménytényező-korrekcióját (PFC).
Mivel a motortechnika tovább fejlődik, és az alkalmazások is változnak, a felhasználók számíthatnak olyan további újításokra is az MCU-k és a DSC-k felépítésében, valamint a teljesítőképességük növelésében, amellyel nemcsak az egyre összetettebb vezérlési stratégiák, hanem a rendszerirányítási és kommunikációs funkciók is megvalósíthatóvá válnak.
Szerző: Patrick Heath – Microchip Technology, Inc.
www.microchip.com
még több Microchip














