



11 tévhit az induktív helyzetérzékelőkről
 Az automatizált berendezések – ma már a modern autókat is beleértve – vezérlőegységeinek pontosan ismerni kell a rendszer mozgó részeinek helyzetét és elmozdulását. Ennek „régi – új” eszköze a differenciáltranszformátor elvén működő induktív pozíciószenzor, amelynek előnyeit ismerteti a szerző két másik technológiával, a Hall-szondás és a magnetorezisztív átalakítókkal egybevetve.
Az automatizált berendezések – ma már a modern autókat is beleértve – vezérlőegységeinek pontosan ismerni kell a rendszer mozgó részeinek helyzetét és elmozdulását. Ennek „régi – új” eszköze a differenciáltranszformátor elvén működő induktív pozíciószenzor, amelynek előnyeit ismerteti a szerző két másik technológiával, a Hall-szondás és a magnetorezisztív átalakítókkal egybevetve.
Régóta erre vártunk, és most széles körben megvalósul: itt a mesterséges intelligencia (MI). Az automatizált gyáraktól az önvezető személy- és teherautókon át a robotizált járművezetőkig azt látjuk, hogyan teszi az MI hatékonyabbá és profitábilisabbá életünket, és hogyan javítja annak minőségét. És mindezen automatikus gépek és járművek belsejében ott találjuk a képességet a mozgó alkatrészek pozíciójának és mozgásának pontos mérésére.
A pozíciómérésnek számos módja ismeretes. Ezek egyike, az induktív pozícióérzékelés különösen gyorsan fejlődik. Pontossága, zajvédettsége és költséghatékonysága csak néhány e technológia számos előnyei közt. Az alábbiakban néhány elterjedt félreértést szeretnénk eloszlatni, amely gyakran merül fel, ha az induktív helyzetérzékelést olyan más technológiákkal hasonlítjuk össze, mint a Hall-effektuson alapuló, vagy magnetorezisztív szenzorok.
1. tévhit: az induktív szenzorok induktivitásmérésre
vezetik vissza a pozíciómérést
A név ugyan félrevezető lehet, de az az igazság, hogy az induktív szenzorokban nem történik induktivitásmérés. Ehelyett azt az elektromágneses indukciót hasznosítják, amelyet a mágneses mező kelt a fémtárgyakban, hasonlóan a légmagos transzformátor jól ismert tulajdonságaihoz, és a céltárgy helyzete az általa keltett mágneses zavaró hatásokból a Faraday-törvény szerint pontosan meghatározható. Meglehet, ez bonyolultan hangzik sokunk számára, akik már elfelejtettük mindazt, amit az iskolában az elektromágneses mezők elméletéről tanultunk, ezért elégedjünk most meg azzal az egyszerű megfogalmazással, hogy az induktív szenzorok működése azon a zavaró hatáson alapul, amelyet egy vezető anyagból készült tárgy okoz a mágneses mezőben.
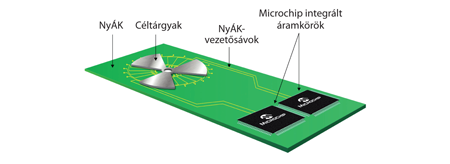
Ráadásul ezt a mágneses mezőt – a Hall-szenzoros vagy magnetorezisztív érzékelőktől eltérően – nem egy állandó mágnes állítja elő, hanem egy transzformátor primer tekercse. Ennek mágneses mezejét két szekunder tekercs érzékeli. Éppen úgy, mint a közönséges transzformátoroknál, a Faraday-törvény segítségével határozhatjuk meg, mekkora feszültséget kelt ezekben a szekunder tekercsekben a primer tekercs mágneses mezejének változása. Ha egy fémtárgyat helyezünk ebbe a mágneses mezőbe, abban ez örvényáramot kelt, amelynek mágneses mezeje ellentétes a primer tekercs által generált mezővel, és emiatt a térerősség a céltárgyban nullára csökken. Ha a fémtárgyat különböző fizikai távolságban helyezzük el, a két érzékelőtekercsben eltérő feszültség keletkezik. A céltárgy helyzete az e két tekercsben keletkező feszültségek arányából egyszerűen kiszámítható (1. ábra).
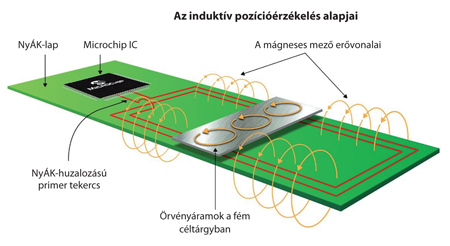
1. ábra Egy induktív pozícióérzékelő felépítésének vázlata
2. tévhit: az induktív helyzetérzékelők nem pontosak
Ez egy könnyen cáfolható tévhit, mert az induktív pozícióérzékelők nagyon pontosak, kiváltképpen a magasabb hőmérsékleteken, ahol a más mágneses elven működő rendszerek már bajban vannak. Az induktív pozícióérzékelő pontossága főként annak tulajdonítható, hogy működése nem az állandó mágnesek nemlineáris tulajdonságain, hanem az önmaga által keltett mágneses mező megzavarásán alapul. Ennek eredményeképpen a teljes mérési tartományra vonatkoztatva, szobahőmérsékleten ±0,1%, a teljes üzemi hőmérséklet-tartományra vonatkoztatva pedig akár ±0,3% pontossággal is mérhető a légrés vastagsága az érzékelő és a céltárgy között. Ráadásul a kiértékelő algoritmus is megtervezhető úgy, hogy kiküszöbölje vagy minimálisra csökkentse a hőmérséklet-változás hatását. Például egy induktív helyzetérzékelő 1 és 6 MHz közötti frekvenciával gerjeszthet mágneses mezőt. A frekvenciát egy LC-oszcillátor határozza meg, amely ugyan változhat a hőmérséklet függvényében, de ennek nincs hatása a pozícióérzékelésre. Ennek oka az, hogy a szekunder feszültségeket érzékelő csatornák szinkrondemodulációt alkalmaznak (2. ábra), amelynek frekvenciáját ugyancsak a primer tekercs gerjesztését vezérlő oszcillátor határozza meg. Ezért ennek a frekvenciának a hőmérsékletfüggő változása nincs semmiféle hatással az érzékelőtekercsekben keletkező jelekre. Ha a hőmérséklet nem is, de a szenzor közelében levő más fémtárgyak jelenléte befolyásolhatja a mágneses mezőt. Ennek következtében szükség van valamilyen szintű kalibrációra, de ez nem függ a hőmérséklettől. Például a Microchip Technology LX3302A áramköre nyolc kalibrációs szegmenst használ. Az eszköz 13 bites analóg-digitális átalakítói (ADC) és 32 bites processzorai szintén segítenek a számítási és kvantálási hibák kiküszöbölésében, amelynek következtében a kimeneten 12 bites felbontással jelenik meg a mért érték a teljes üzemi hőmérséklet-tartományra vonatkoztatva.
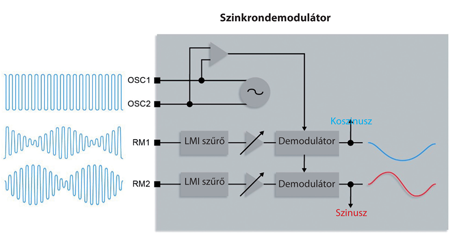
2. ábra A szinkrondemodulátor egy lehetséges megvalósítása
3. tévhit: az induktív helyzetérzékelők költségesek
Nem megszokott, hogy egyszerre mindkét szempontból is a legelőnyösebbet kapjuk: jó minőséget elfogadható áron, de az induktív helyzetérzékelők mindkét elvárásnak megfelelnek. Míg a Hall- és a magnetorezisztív szenzorok megkövetelik, hogy egy állandó mágnes úgy legyen legyártva, hogy az általa keltett mágneses térerősség megfelelően szűk tűréshatáron belül legyen ahhoz, hogy az elvárt pontosságú szenzort lehessen belőle gyártani, az induktív szenzorokban csak egy fémdarabot kell alkalmazni céltárgyként, megkímélve a felhasználót az igényes állandó mágnes költségeitől. A NyÁK méretének ugyan nagyobbnak kell lennie a szenzortekercsek helyigénye miatt, de ez a költségtöbblet rendszerint jelentősen elmarad az állandó mágnes költségeitől; és ha a felhasználónak – egyéb okokból – adva van a nagyobb méretű NyÁK, ez a költségtényező ingyen áll a rendelkezésére. Tehát az induktív pozícióérzékelő költséghatékonyabb megoldás akár a Hall-szenzoros, akár a magnetorezisztív technológiánál, mivel a szükséges mágneses mezőt állandó mágnes nélkül állítja elő.
4. tévhit: az induktív helyzetérzékelők érzékenyek
a külső mágneses mezőkre
A jelenkor automatikus gépei bármelyik elődjüknél több szórt mágneses mezőt állítanak elő, amely problémákat okozhat a Hall-szenzoroknak és a magnetorezisztív érzékelőknek is. Az induktív pozícióérzékelők azonban – az alkalmazott szinkrondemoduláció következtében – elnyomják ezeket a szórt mágneses mezőket.
Az újgenerációs elektromos autókban több száz amperes áram folyik az akkumulátorokból a hajtómotorokba (3. ábra). Ráadásul a legtöbb autóban legalább három kefe nélküli egyenáramú (BLDC) motor található az autó meghajtásában, a szervokormányban és a fékrásegítőben. Ezek mindegyike szórt mágneses mezőt állít elő. Ezeknek a zavaró szórt mágneses mezőknek a gyors növekedése miatt az elektronikus eszközöket a korábbiaknál nagyobb mágneses mezőkkel szembeni védettségre kell tesztelni. Az autóiparban az elektronikákkal szemben manapság az a követelmény, hogy 4 mT időben változatlan mágneses indukciót viseljenek el az elektromágneses kompatibilitási (EMC) minősítés során, és téves mérési eredmény egyetlen biztonságkritikus szenzornál (mint például a kormányszervó, a gázpedál vagy a hajtómotor-forgórész pozícióérzékelője) sem fordulhat elő. Az induktív pozícióérzékelés szépsége abban áll, hogy védett az ilyen zavarok ellen, mivel a bemeneti jel aktív szűrése következtében csak az érzékelni kívánt frekvenciára érzékeny. Mivel az induktív pozíciószenzorok felépítésében semmilyen ferromágneses anyagnak nincs szerepe, ezért érzéketlenek az időben változatlan mágneses mezőre. Más szavakkal a Faraday-törvényből az következik, hogy a statikus mágneses mező nem hoz létre indukált feszültséget. Ráadásul a fentiekben bemutatott szinkrondemodulátor kiszűr minden más, a primer tekercs gerjesztőjelének frekvenciájánál nagyobb és kisebb frekvenciájú jelet – hasonlóan ahhoz, ahogy egyetlen AM-rádióállomás jelét kiválasztjuk az antenna által érzékelt teljes AM-frekvenciasávból. Ehhez hasonló zavarójel-elnyomásra sem a Hall-típusú, sem a magnetorezisztív helyzetérzékelők nem képesek.
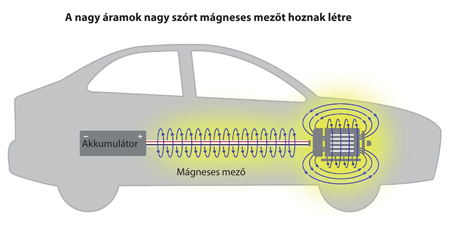
3. ábra A motor és a nagy tápáram jelentős szórt mágneses mezőt hoz létre
5. tévhit: az induktív pozícióérzékelés új,
kiforratlan technológia
Az induktív pozícióérzékelők jelenlegi kialakításukban érzékelőként egy NyÁK-ot, céltárgyként pedig egy fémdarabot használnak. Miközben ez valóban újszerű technológia az érzékelés megvalósítására, a működési elv rég ismert és jól bevált. A lineáris elmozdulást érzékelő differenciáltranszformátor (Linear Variable Differential Transducer – LVDT) nagyon közeli rokonságban van az induktív helyzetérzékeléssel. Az LVDT-nek egy primer és két szekunder tekercse van, amelyekkel egy fémtengely helyzetét lehet érzékelni – ez jól bevált módszer a robotikai alkalmazásokban. Az induktív pozíciószenzorok pontosan ugyanezen az elven működnek, csupán azzal az eltéréssel, hogy a huzaltekercseket a NyÁK vezetőfólia-sávjaiból kialakított mintázat helyettesíti. Az LVDT forgómozgásra tervezett változatai, mágneses szögelfordulás-érzékelők (rezolverek) hasonló megoldásokat használnak (4. ábra). Ismét hangsúlyozzuk tehát, hogy az induktív helyzetérzékelők ugyanazt a funkciót valósítják meg, mint a masszív fémszerkezetre emlékeztető differenciáltranszformátorok, csak a NyÁK vezetősávjaiból kialakított tekercselésekkel. A pozíció érzékelése az LVDT-kben, a rezolverekben és az induktív átalakítókban egyaránt két feszültség arányának kiértékelésével történik, amelynek nagyságát az a „zavarás” határozza meg, amit egy vezető anyagú szerkezeti elemnek a mágneses mezőben való elhelyezkedése határoz meg.
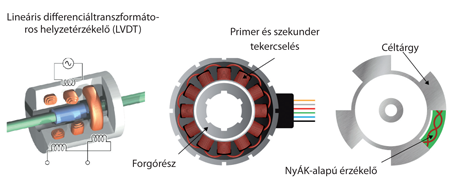
4. ábra Az LVDT, a rezolver és az induktív érzékelő szerkezetének összehasonlítása
6. tévhit: a redundáns induktív szenzorok
kétszeres helyet igényelnek
A kritikus automotív és ipari megoldásokban a legmagasabb fokú biztonság elérése érdekében gyakran van szükség redundancia beépítésére. A NyÁK rétegeinek optimalizálásával és néhány „okos” primer tekercselési megoldás alkalmazásával egy duplázott érzékelő kialakításához nincs szükség kétszeres NyÁK-felületre (5. ábra). Ellenkezőleg: mindkét független szenzor elfér ugyanazon a NyÁK-területen. Ebben az esetben ugyanazon a mágneses mezőn „osztoznak”, viszont a két szenzor galvanikusan el van szigetelve egymástól. A független szekunder tekercsek két külön integrált áramkörrel megvalósított kiértékelő elektronikához csatlakoznak, tehát a kimeneti adataik egymástól függetlenül keletkeznek, és a redundancia megvalósításával növelik az alkalmazás biztonságát.
5. ábra Redundáns szenzormegoldás
7. tévhit: az induktív pozíciószenzorok csak kicsiny, egyenesvonalú elmozdulásokhoz használhatók
Az induktív helyzetérzékelők nagyon különböző lineáris elmozdulástartományoknál alkalmazhatók. A legnagyobb pontosság akkor érhető el, ha az érzékelő hossza megközelíti a kívánt méréstartományt, így a kimenet felbontása a legjobban kihasználható. Ez a szenzorhosszúság 5-től 600 mm-ig (vagy még azon is túl) megválasztható a gyakorlati alkalmazástól függően. Korlátozást csak az jelent, hogy az oszcillátornak képesnek kell lennie a helyes LC-rezonanciafrekvencia előállítására. Az összes esetben ugyanaz a működési elv: a szenzor mágneses mezőt generál, és érzékeli, milyen mértékben zavarja meg azt a céltárgy jelenléte. Az egyenesvonalú elmozdulás mérése esetén a technológiának határozott előnyei vannak, és a kívánt érzékenységet ugyanazzal a mérési elvvel lehet biztosítani a mérési tartományok széles spektrumában. A Hall-szenzorok alkalmazása esetén előfordulhat, hogy több Hall-szondát is el kell helyezni a mágnes elmozdulási pályája mentén. Az egyes Hall-érzékelők közötti átkapcsolás bonyolult, és függhet a környezeti hőmérséklettől is. Egy induktív átalakítót nem terhelnek efféle nehézségek, és olyan kimeneti jelet állíthat elő, amely közvetlenül illeszkedik az alkalmazás valós igényeihez.
8. tévhit: az induktív pozíciószenzorokkal csak
egyenesvonalú elmozdulások mérhetők
Az egyenesvonalú (lineáris) elmozdulás mérésénél ennek az eljárásnak komoly előnyei vannak, de az induktív pozícióérzékelőkkel forgómozgást és szögelfordulást is mérhetünk oly módon, hogy változatlanul élvezhetjük a nagyobb pontosság és a magasabb zajvédettség előnyeit. Az autó pedáljainak, a levegőáramlás szelepeinek pozícióját, és a forgórészek elfordulását mérni egyaránt lehetséges az induktív pozícióérzékelés segítségével.
Képzeljünk el egy 360 fokos forgásérzékelőt úgy, mintha egy lineáris szenzort úgy hajlítanánk meg, hogy a vége a kezdetéhez érjen. Kiderült, hogy a forgó induktív helyzetérzékelők a legpontosabbak, mivel az előállított mágneses mező az érzékelő sugarától függetlenül nagyon egyenletes eloszlású. Ezzel a technológiával tehát a lineáris elmozdulásmérésen kívül a szögpozíció és a forgó mozgás érzékelése egyaránt megoldható.
9. tévhit: a céltárgy anyagának mágnesezhetőnek kell lennie
Az induktív pozícióérzékelő a mágneses mező megváltozásait detektálja. A mágneses mezőt egy fém céltárgy akkor is képes megváltoztatni, ha nem mágnesezhető anyagból van. Bármilyen áramvezető tulajdonságú anyagban kialakulnak az indukált örvényáramok (6. ábra), amelyek ezt a zavaró hatást kiváltják. Az olyan mágnesezhető anyagok, mint a vas, ugyancsak vezetőképesek, tehát ezek is alkalmazhatók, viszont akkor érhető el jobb érzékelési távolság és alacsonyabb tápáramfelvétel, ha a céltárgy anyaga jó vezető, mint a réz, az alumínium vagy az acél.
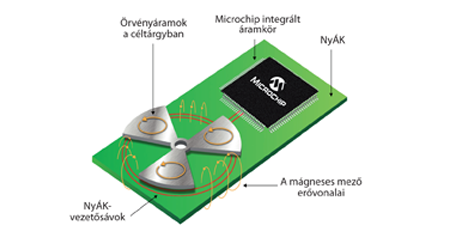
6. ábra Az örvényáramok kialakulása egy fémalkatrészben
10. tévhit: az induktív szenzorokat a tápbemenetükkel
kell programozni
Egy autóban számos, modulárisan kialakított szenzoralkalmazás van a motorvezérlő egységhez a kábelezés vezetékeivel csatlakoztatva. Egy szenzornak normál körülmények között egy táp- és egy földvezetéke, valamint egy kimenete van. Ahhoz, hogy képesek legyünk kalibrálni a modult, célszerűnek látszik azt a tápfeszültség-vezetéken keresztül programozni, mivel így nincs szükség további vezetékekre a szenzor NyÁK-csatlakoztatásához. Ezzel alkatrész- és szerelési költség takarítható meg. Néhány alkalmazás viszont megkívánja egy mikrovezérlő felhasználását, és ez az az eset, amikor a modulvizsgáló célberendezés helyett egy másik mikrovezérlő programozza a szenzort. A Microchip LX3302A integrált áramkörnek van ilyen funkciója és képessége, amely lehetővé teszi, hogy a szenzort egy mikrovezérlő általános célú be-kimeneti vezetékein (GPIO) át programozzuk.
11. tévhit: Ön magára van hagyva a tervezési feladattal
Még nem is túl régen a mágneses mezők elméletének biztos ismerete, és egy csúcskategóriás végeselem-szimulációs szoftver – vagy ezek híján a „próba-szerencse” módszere – volt szükséges a jó eredmény eléréséhez. Jelenleg azonban az integráltáramkör-gyártók ezeket a szolgáltatásokat értékelőkészletek formájában bocsátják a felhasználók rendelkezésére, amelyekkel az ötlettől a tényleges NyÁK-vezetékminta szimulációjáig végig támogatják a tervezési folyamatot. Néhány integráltáramkör-gyártó még olyan szimulációkat is kínál, amely arra a mérési hibára is becslést ad, amely a vizsgált NyÁK-mintázattól várható még annak elkészülte előtt. A Microchip mindezt a támogatást a felhasználói rendelkezésére bocsátja, így Önnek nem kell úgy éreznie, hogy magára maradt a NyÁK-tervezés feladatával.
Összefoglalás
Ez a tizenegy tévhit és a cáfolatuk mutatják, milyen eredményekre számíthatunk az induktív helyzetérzékelők alkalmazása során a pontosság, a szórt mágneses mezők elleni védettség és költséghatékonyság terén a Hall-effektuson alapuló és a magnetorezisztív szenzorokkal összehasonlítva. Készen áll arra, hogy kipróbálja ezt a technológiát a következő, MI-alapú helyzetérzékelő-alkalmazásának tervezésére?
Szerző: Mark Smith, PhD, termékcsalád-marketingigazgató –
Kevert jelű és lineáris részleg, Microchip Technology
www.microchip.com














