



A 3D-s kamerák fontos motorjai az új ipari forradalomnak
 Az ipari automatizálás egy magasabb szintje érhető el a 3D-s adatokat szolgáltató szenzorok, kamerák és egyéb 3D-s eszközök révén. Az áruk jelenleg még magasabb a „régi” hagyományos kamerákkal, szenzorokkal szemben, de sok esetben nem tudjuk kikerülni a használatukat ha a termelésben nagyobb integráltságú, magasabb szintű automatizálás szükséges. Ezek az eszközök természetesen komoly szoftveres támogatással igazi „szemei” lesznek egyes gyártási vagy logisztikai műveleteknek.
Az ipari automatizálás egy magasabb szintje érhető el a 3D-s adatokat szolgáltató szenzorok, kamerák és egyéb 3D-s eszközök révén. Az áruk jelenleg még magasabb a „régi” hagyományos kamerákkal, szenzorokkal szemben, de sok esetben nem tudjuk kikerülni a használatukat ha a termelésben nagyobb integráltságú, magasabb szintű automatizálás szükséges. Ezek az eszközök természetesen komoly szoftveres támogatással igazi „szemei” lesznek egyes gyártási vagy logisztikai műveleteknek.
Ebben a cikkben a teljesség igénye nélkül bemutatunk két eszközt és két technológiát, amelyek nemcsak 3D-s képeket készítenek, hanem elemzéseket is, amiket a további automatizálás érdekében használnak fel.
Bin Picking – ömlesztett áruk válogatása
A 3D-s kamerapiacra szinte berobbantak a PhoXi-3D szkennerek, amelyek nagyon pontos és alacsony zajszintű 3D-s képeket készítenek, így kiválóan alkalmasak robotalkalmazások kivitelezésére. A legtöbb olyan esetben, amikor a termék elhelyezése a robot munkaterébe nem pontos, vagy az alkatrész puha, illetve amorf, esetleg egyszerre több alkatrész között csak 3D-ben láthatók különbségek, vagy egyszerűen ömlesztett alkatrészekről van szó, akkor egy robot csak 3D képfeldolgozással tud megfelelően működni. Ehhez nemcsak jó minőségű 3D-s adatokra van szükség, hanem bonyolult matematikai műveletekre is. A magas szintű szoftveres támogatást nyújtó Photoneo mellett a SANXO-Systems Kft. fejlesztései és megoldásai is jelentősen lerövidítik a robotprogramozást, és csökkentik egy robotos feladat integrációs, illetve bevezetési költségeit. Az érthetőség kedvéért nézzük meg, hogyan működik ez a gyakorlatban.
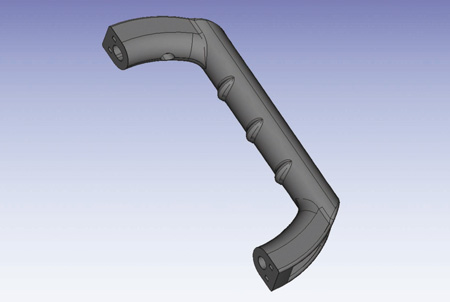
1. ábra CAD modell a tárgyról
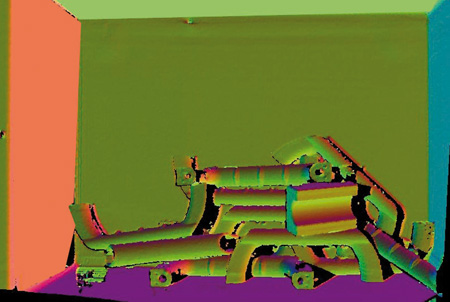
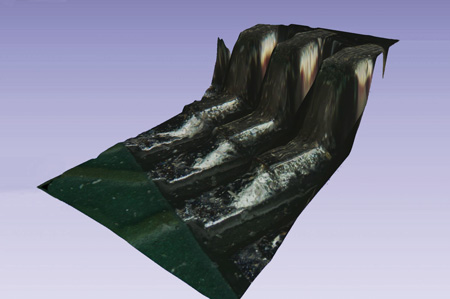
2. ábra A 3D-s pontfelhő, ezt látja a kamera
A 3D-s adatfeldolgozás
A 3D-s adatfeldolgozás több lépcsőben történik. Adott egy termék és annak egy CAD modellje, amelyből pontfelhőt készítünk. Ha több terméket is használunk, akkor több CAD modellel dolgozunk.
A 3D-s szkenner egy jelre beszkenneli a tér egy adott részét, és egy pontfelhőt ad vissza. A 3D-s pontfelhőn és a modellen ezek után kulcspontokat (keypoints/interest points) keresünk, amelyek „érdekesek lehetnek”, azaz megszabadulunk a kevésbé lényeges, nem elég deskriptív pontoktól. (1. és 2. ábra)
Érdekes pontok például a téglatest sarokpontjai vagy élei, amelyek – ellentétben a téglatest oldallapjaival – sokkal hasznosabbak, ugyanis (pl. a téglatest sarokpontjai esetében) sokkal egyedibbek, környezetükben éles változásokat lehet megfigyelni.
Ezek után minden ilyen modell és kép kulcspontjához társítunk egy deskriptort, amely leírja az adott kulcspont geometriai környezetét. Ezek a deskriptorok egy eszközt adnak arra, hogy le tudjuk írni egy pont környezetét, illetve azt, hogy mit jelent két pont (pontosabban azok környezetének) hasonlósága.
Miután végeztünk a deskriptorok pontokhoz való társításával, megkezdhetjük a modell és a kép deskriptorainak összehasonlítását. Ha két deskriptor különbsége egy bizonyos határon belül van, akkor egyezőnek állapítjuk meg őket és hozzáadjuk egy listához, amelyben az egyezéseket tároljuk. Itt érezhető a legjobban, hogy milyen fontos a redundáns és nem informatív adat levágása, ugyanis ha van N modellben deskriptorunk és M képben deskriptorunk, akkor N × M összehasonlítást kell elvégeznünk majd.
Egyszerűbben fogalmazva, van egy bizonyos paraméterek szerint „tippelgető” algoritmus, ami lehetséges pozíciókat tippel, továbbá egy olyan algoritmus, amely ezt követően a lehető legpontosabban beleilleszti a CAD modellt a pontfelhőbe. Ha a tárgy csak részben látszik – mert takarva van más tárgyaktól –, akkor is be tudja illeszteni. Ezután következik a megfogási pont és orientáció kiválasztása, illetve ennek megfelelő robotpozíció és orientáció meghatározása.
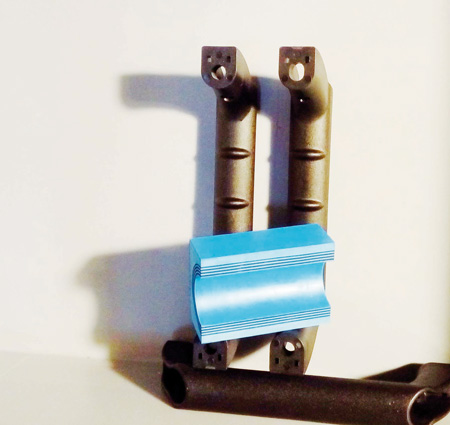
3. ábra 2D-s fénykép

4. ábra A pontfelhőben a megtalált tárgy
A két képen (3. és 4. ábra) a negatív félhenger tárgyat keressük a pontfelhőben. A kék pontok az algoritmus első tippjei, majd a zöld pontfelhő a már beigazított tárgy, amely a legoptimálisabban fedi a pontfelhőt.
3D a miniatűr világ számára
A 3D-s kép készítésére többfajta technológia létezik: a vonallézeres profilozás, a sztereó aktív és passzív képalkotó módszer, a strukturált fényen alapuló módszer, a ToF-kamera stb. A miniatűr tárgyak 3D-s képalkotásánál az eszközök fizikai dimenziói miatt ezek a technológiák nem vagy nehézkesen használhatók. Kis tárgyakról történő 3D-s képalkotásnál előnyös az image stacking technológia használata. Ez a nem túl gyakran használt megoldás ugyan több számolást igényel, de egyszerre „ad a kezünkbe” egy majdnem 180 fokot letapogató pontfelhőt és ugyanabból a perspektívából egy részletdús, nagy mélységélességű képet, ami tartalmazza az objektumok struktúrájára és színére vonatkozó információkat is. Nagymértékű nagyításnál az optikák mélységélessége csökken, és a kevesebb fényt nagyobb apertúrával engedi be az optika. Program alapján változtatható mélységélességű optikával – kalibrálást követően – a felületi pontok pontos magasságát is meg lehet határozni. A mélységkép alkalmazásával, a képsorozat releváns részeit textúraként felhasználva a megfigyelt tárgy 3D felületmodellje is elkészíthető.
5. ábra IC forrasztott lábai, szkennelt 3D-s felület
Az így keletkezett, mérethelyes felületmodellen ezután 3D-s méréseket lehet végrehajtani, illetve ennél a megoldásnál is kereshetők a miniatűr tárgyak a pontfelhőben, mint az előző példánál. Kis tárgyak, csavarok, csapok, düznik és megannyi más kis alkatrész válogatása, automatikus behelyezése, szortírozása a kis méret miatt sokszor még emberi közreműködéssel történik, főleg az emberi kéz finommotoros tulajdonsága miatt. Ezeket a munkafázisokat a robotok még nem tudják elvégezni, de bizonyos részfeladatokat már igen. A SANXO-Systems Kft. által kidolgozott 3D-s kameramegoldás költséghatékony, nagyon kis súlyú, méretében is kicsi, ezért ideális a robotmegfogóra rakni. Az image stacking technológiát alkalmazó 3D-s kamera a robot koordinátarendszerében határozza meg a felvevési pont korrekciózott értékét, amely nagyban leegyszerűsíti a robotprogramozást, ezáltal automatikusan lehet on-the-fly robotpályát generálni – amely jelentősen csökkenti a robotbetanítás idő- és költségráfordítását.
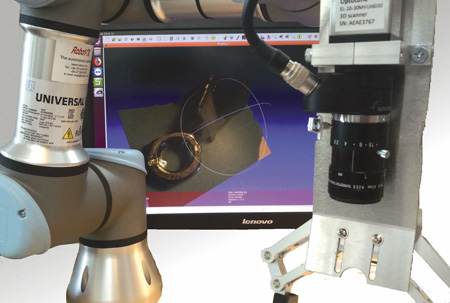
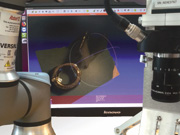
6. ábra UR3 Robot és a fejre szerelt 3D-s szkenner
A robot önmagában csak egy mechanizmus, valamint limitált feladatok elvégzésére alkalmas. Igazán akkor válik hasznossá, akkor lehet vele költséghatékonyan feladatokat megoldani, ha olyan szenzorokkal és olyan szoftverekkel látjuk el, amelyek segítségével bizonyos kereteken belül önállóan képes elvégezni a feladatát és nem kell több időt tölteni a programozásával.
Szerző: J.Tóth Sándor – SANXO-Systems Kft.
SANXO-Systems Finn-Magyar
Méréstechnikai és Automatizálási Kft.
1221 Budapest, Arany J. u. 87/B
Mobil: +36 30 327 1100
E-mail: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
www.sanxo.eu














