



Szabályozástechnika 60
Összefoglalás
Mottó helyett
Bevezetésként álljon itt Tuschák Róbert és Fodor György munkáiból – a lényeget kiválóan és tömören megragadó (már az Elméleti alapokban is közölt és ismétlésre méltó) – két idézet:
„Az irányítás egy folyamatba való beavatkozás adott cél elérése érdekében. Szűkebb értelemben rendszerint technológiai, tágabb értelemben bármilyen fizikai, kémiai, biológiai, gazdasági folyamatról van szó. A folyamat változását a folyamat mozgásának tekintjük, amely külső és belső hatások következtében áll elő. Mind a jellemzőket, amelyekben a mozgás megnyilvánul, mind pedig a külső hatásokat jelek testesítik meg. A jeleknek van fizikai megjelenési formája – áram, feszültség, hőmérséklet, elmozdulás stb. – ez a jelhordozó, és van információtartalma, amely a jel által képviselt hatásról tudósít (pl. mutatja, hogy egy hálózat valamelyik ágában hogyan változik az áram, vagy milyen tápfeszültség-változás éri kívülről a hálózatot). Az irányítás általános módja az, hogy egy e célra létesített külső irányító berendezés mért vagy más úton szerzett adatok alapján megváltoztatja a folyamat közvetlenül befolyásolható jellemzőit, és ezen keresztül eléri más jellemzőknek a kívánt mozgását is. Az irányított folyamat és az irányító berendezések együttese az irányítási rendszer. A rendszertechnika a folyamatok anyagi minőségétől elvonatkoztatva a rendszerek közös jellegzetességeivel foglalkozik, és azokból von le következtetéseket (pl.az irányító berendezés struktúrájára vonatkozóan). … Az irányítási rendszertechnika a jelekkel végzett műveletek tudománya. Irányításelméletnek is szokás nevezni, amely az irányítástechnikának egyik fontos, de nem kizárólagos része. Kifogástalanul működő rendszer létrehozásához ezenkívül nem nélkülözhető a folyamatnak, a felhasznált eszközök működésének, a méréstechnikának, a szoftver technikának stb. az ismerete. Figyelembe kell venni a környezeti, biztonsági, technológiai és gazdasági szempontokat is.” (Dr. Tuschák Róbert: Szabályozástechnika. Műegyetemi Kiadó. 1994)
„A valóságos fizikai, kémiai, műszaki, gazdasági folyamatokat modellek segítségével írjuk le. A modellalkotás során leegyszerűsítjük a jelenségeket, miáltal lehetővé tesszük a folyamatokban részt vevő mennyiségek értelmezését és a kapcsolataik leírását. Az egyszerűsítés szükségszerűen oda vezet, hogy a modell nem írja le kifogástalanul a folyamatokat. Nagyon nehéz és nem egyértelműen megoldható feladat olyan modellt alkotni, amely a vizsgált folyamatot elfogadható mértékig helyesen és ugyanakkor a rendelkezésre álló eszközökkel kezelhető módon írja le. … Mivel nem foglalkozunk a folyamatok valódi tartalmával, ezért a tárgyalt fogalmak és módszerek meglehetősen általánosak. …Az általánosságnak viszont az az ára, hogy a tárgyalt folyamatok és a bennük szereplő változók elvontak. Amikor a továbbiakban arról beszélünk, hogy egy u gerjesztőjel hatására (esetleg sok közbülső jel közvetítésével) milyen y válasz jön létre, akkor az Olvasó érdeklődése és ízlése szerint gondolhat egy erő hatására fellépő más erőre, elmozdulásra vagy elektromos feszültségre, elektromos áram hatására létrejövő elektromos feszültségre vagy hőmérsékletre, pénzbefektetéshez tartozó árukészletre és így tovább.” (Fodor György: Jelek és rendszerek. Műegyetemi Kiadó. 2006)
A dinamikus szabályozás alrendszerei és ezek matematikai modellje
A Szabályozástecnika című cikksorozatban folytatólagosan tárgyaltuk a téma alapfogalmait. Ezekben a legfontosabb elveket és szabályozási struktúrákat ismertettük. A tárgyalás elvi alapját a szabályozót és a szabályozott folyamatot (mint alrendszereket) absztraháló matematikai modell teremti meg. A szabályozás jelfolyama egy hatásvázlattal absztrahálható, ami a két alrendszerből felépülő, negatívan visszacsatolt eredő rendszer alrendszereinek, és magának a teljes rendszernek a matematikai modelljeit, a jelek közötti oksági viszonyokat szimbolizálja (1. ábra), elvonatkoztatva a fizikai rendszerek valóságos objektumaitól. Eme modellalapú analízis és szintézis olyan szabályozási algoritmus előállítását teremti meg, amely a folyamatmodellel együttműködve a tervezés célkitűzéseit maradéktalanul kielégíti. A fizikai valóságban azonban a folyamatmodell nem egy egzakt leírás, ezért a modellalapú működésmód csupán közelíti a fizikai rendszer valóságos viselkedését.
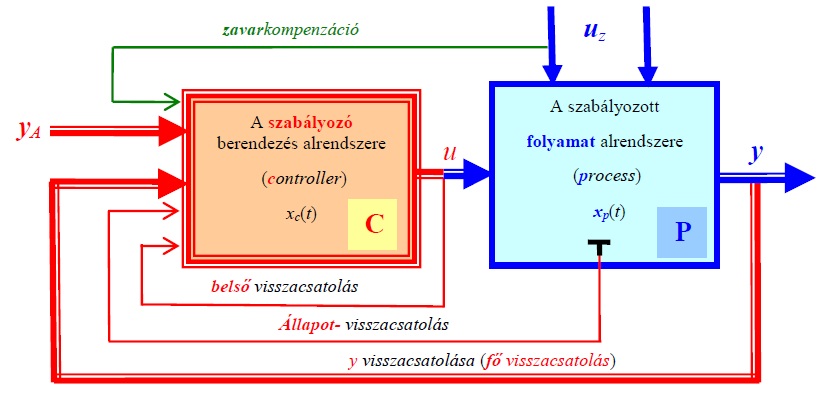
1. ábra A szabályozás hatásvázlata
Azok a függvénykapcsolatok, amelyek megmutatják, hogy a folyamat (process, plant) y és a szabályozó (controller, regulator, control algorithm) u kimenőjeleit (amelyek egyébként a folytonos t időnek is a függvényei) milyen módon befolyásolják az u, uz, illetve az yA, y, u, uz közvetlen bemenőjelek, valamint a szabályozó és a folyamat xc és xp belső állapotváltozói (amelyek szintén függvényei a t időnek), általában differenciálegyenleteket tartalmazó matematikai összefüggések. A teljes irányítási rendszer leírásához az alrendszerek leírásán keresztül vezet az út.
Miután egy tetszőleges u(t) bemenőjelű, y(t) kimenőjelű és x(t) állapotváltozóval jellemzett dinamikus tag esetében időben lejátszódó hatásterjedési jelenségekről van szó, a dinamikus rendszerekben lejátszódó folyamatok leírásának módszere a differenciálegyenlettel történő matematikai modellezés. Ennek általános formája az
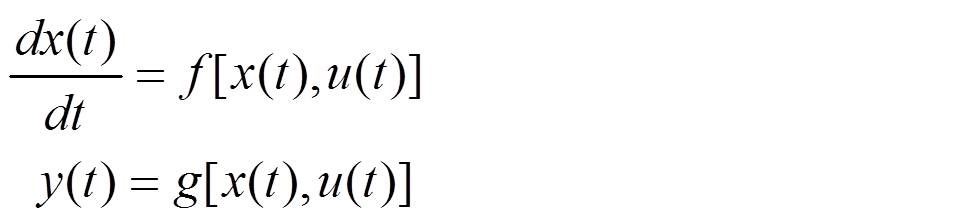
állapotegyenlet reprezentáció alakjában jeleníthető meg, ami az u bemenő-, és az y kimenőjelek közötti függvénykapcsolatot az x állapotváltozók közvetítésével leíró matematikai képlet, f és g tetszőleges, folytonos függvények. Az általános MIMO-tag matematikai modellje a j számú ui bemenőjelet, a k számú yi kimenőjelet, az n számú xi állapotváltozót tartalmazó és az időtartományban értelmezett nemlineáris állapotegyenlet. Ez n számú elsőrendű közönséges differenciálegyenlet és k számú nemlineáris algebrai egyenletet jelent. Ebből (rendszerint egy munkaponti linearizálás végrehajtásának eredményeként) származtaható a dinamikus tag

lineáris állapotegyenlete, amely egy egyensúlyi pont környékére érvényes hatáskörrel jellemzi az eredeti rendszert (A, B, C, D az u, y, x vektorokhoz illeszkedő paramétermátrixok). A lineáris rendszer esetében a Laplace-integráltranszformáció alkalmazásával a t idő- tartományból az s operátortartományra térhetünk át, ekkor a lineáris állapotegyenlet reprezentációhoz a
![]()
algebrai egyenletek rendelhetők: (x(0) az állapotvektor kezdeti értéke, y(s), u(s), x(s) az y(t), u(t), x(t) jelek Laplace transzformáltjai). Ez utóbbi egyenletekből az állapotváltozó x(s) és a kimenőjel y(s) transzformáltjai (mint x(0) és u(s) függvényei) explicit módon kifejezhetők:

Adott x(0) kezdeti feltétel és a gerjesztés u(s) transzformáltjának ismeretében x(t) és y(t) inverz transzformációval számíthatók. Ha a kezdeti feltétel x(0)=0, akkor:

Ebben W(s)=C(sI-A)-1B+D a lineáris dinamikus tag átviteli mátrixa. Ez a k számú komponenst tartalmazó y(s) kimenőjel vektor és a j számú komponenst tartalmazó u(s) bemenőjel vektor közötti függvénykapcsolatot egy mártixegyenlet formájában definiálja. A SISO-tag esetében k=j=1, n≥1 és a W(s) átviteli mátrix a W(s) átviteli függvényre egyszerűsödik. A szabályozási rendszerek analízisében és szintézisében az átviteli függvény valószínűsíthetően a legfontosabb rendszerjellemző fogalom, ennek alkalmazásával ugyanis a lineáris differenciálegyenlet-rendszerek időtartományban történő nehézkes kezelése helyett az perátortartományban algebrai egyenletekkel dolgozhatunk. Az állapotegyenlethez rendelhető hatásvázlatot a 2. ábra szemlélteti.
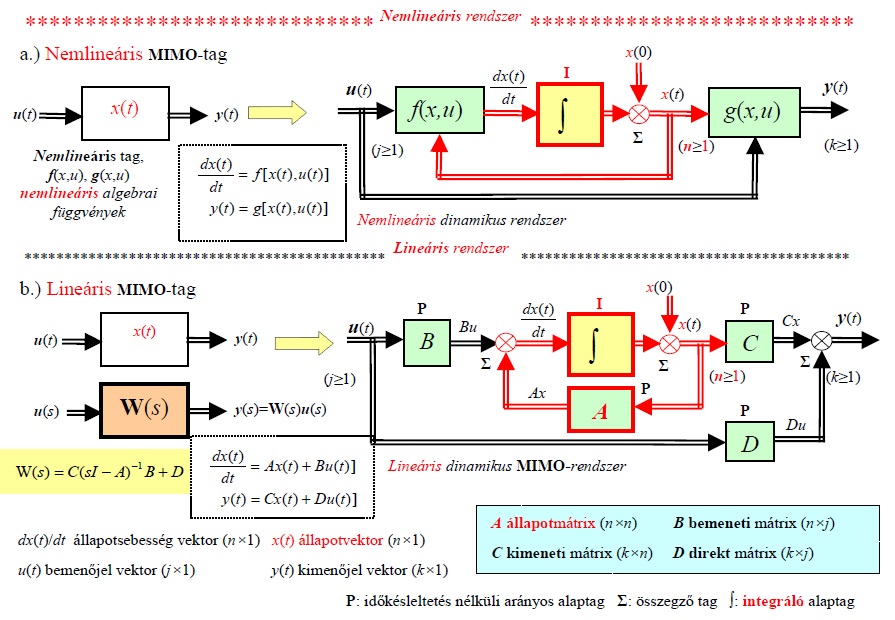
2. ábra. Nemlineáris és lineáris rendszerek állapotegyenleteihez
rendelhető hatásvázlatok
A vektor-mátrix alakban felírt állapotegyenletek ugyan tömören és látszólag igen egyszerű kifejezésekben adják meg a dinamikus rendszer matematikai modelljét, azonban ne feledkezzünk meg arról, hogy végső soron n számú elsőrendű közönséges differenciálegyenletből álló differenciálegyenlet-rendszerről és k számú algebrai egyenletet tartalmazó egyenletrendszerről van szó. A matematikai modell „végletekig leegyszerűsített” alakját a j=1, k=1, n=1 elsőrendű lineáris SISO-rendszer jelenti, amikor is a dinamikus rendszer állapotegyenlet reprezentációja egyetlen közönséges differenciálegyenletet és egyetlen algebrai egyenletet tartalmaz. A 2. ábra nemlineáris és lineáris állapotegyenletekhez rendelhető hatásvázlatai jól szemléltetik, hogy a dx(t)/dt állapotsebesség vektort a lineáris integráló tag bemenetén működtetve ennek kimenetén az állapotsebesség-vektor idő szerinti integrálja – vagyis maga az x(t) állapotvektor mint megoldás – jelenik meg, és az integráló tag bemenetén működtetett dx(t)/dt előállitásában az u(t) és az x(t) jelek játszanak szerepet. Fontos észrevennünk, hogy mivel minden egyes kimenőjel az összes állapotváltozónak és az összes bemenőjelnek a függvénye, ezért bármelyik yi kimenőjel meghatározásához minden xi állapotváltozó és minden ui bemenőjel ismerete szükséges. A 2. ábra hatásvázlatain a jeleket szimbolizáló, nyilakkal ellátott kettős vonalak a jelek oszlopvektor (többkomponensű) voltára utalnak. Ha a nemlineáris rendszert a P0 egyensúlyi pontra linearizáljuk, akkor ennek közelítő lineáris rendszermodelljét kapjuk. Ez utóbbi esetben a linearizált rendszer jelei az egyensúlyi ponthoz képesti dΔx(t)/dt, Δx(t), Δu(t) és Δy(t) megváltozások, és a paramétermátrixokban szereplő adatok a P0 munkapont koordinátáinak függvényei. A hatásvázlatok szemléletesen mutatják, hogy általános esetben az u(t) gerjesztés egyrészt direkt módon (pl. lineáris esetben Du(t) komponens révén), másrészt az x(t) állapotváltozók közvetítésével (lineáris esetben Cx(t) mértékben) befolyásolják az y(t) kimenőjelet; (az u(t) bemenőjel y(t)-re gyakorolt direkt hatása a szabályozott folyamatok modelljében általában nem jelenik meg (D=0), szemben a szabályozó modelljének esetében, amikor is ennek a direkt hatásnak tudatos jelenlétére rendszerint törekvés is van). Az állapotváltozók közvetítésével keltett Cx(t) hatás – a visszacsatolt integráló tag következtében – késleltetve juthat csak érvényre. Az integráló tag visszacsatolásának mikéntjétől függően ez a hatás a rendszer labilitását is előidézheti. A hatásvázlatok – a matematikai modell képletszerű megadásához viszonyítva – szemléletesebben mutatják azt a tulajdonságot, hogy a dinamikus rendszer tranziens folyamatait az integráló tagnak az A állapotmátrixon keresztüli visszacsatolása határozza meg. A zárt hatásláncú szabályozási rendszerek mindkét alrendszerét az állapotegyenleteikkel jellemez-hetjük, és ha ezek lineárisak, az időtartományról az operátortartományra térhetünk át.
A szabályozásban (closed–loop control, feedback control) a negatív (önkiegyensúlyozó) visszacsatolás a meghatározó alapelv, aminek lényege, hogy a szabályozott jellemző yA(t) előírt és y(t) tényleges értékének a különbsége alapján valósul meg az u(t) irányítójel közvetítésével a folyamatba történő automatikus (emberi közreműködés nélküli) és az időben folyamatos beavatkozás. Ennek célja, hogy az y(t) szabályozott jellemző (controlled variable, output signal) a lehető legkisebb hibával kövesse az yA(t) alapértéket (reference signal, set point), bármilyen hatás miatt is változik meg a szabályozott jellemző tényleges y(t) értéke. Az u(t) irányítójel megfelelő irányú és mértékű megváltoztatásával érhető el a h(t)=yA(t)-y(t) között keletkezett eltérésnek (error signal) a lehető legrövidebb idő alatti mérséklése vagy megszüntetése. Ennek eszköze az u(t) irányítójellel történő és egy túlvezérlést tartalmazó beavatkozás, majd ennek a túlvezérlésnek alkalmas módon történő „visszavétele”. A rendszer-elmélet kialakulásával napjainkban már az elméleti eredmények is segítik a megfelelő minőséget biztosító szabályozási rendszerek gyakorlati kialakítását (pl. adaptív, robusztus, predikciós, állapotvisszacsatolt szabályozások, folyamatidentifikáció stb.). Az állapot-visszacsatolás elvére épülő pólusáthelyező és egy célfüggvény minimalizálásával megfogalmazott optimális (LQRLinear Quadratic Regulator) szabályozások szintén a negatív visszacsatolás alkalmazásának alapelvén működnek.
Az 1. ábrán vázolt szabályozási struktúrában egy általános követelményként megfogalmazható célkitűzés: ismert folyamatmodell esetében olyan szabályozási algoritmus létrehozása, amelynek alkalmazásával az u(t) irányítójel úgy befolyásolja az y(t) szabályozott jellemzőt, hogy az a lehető legkisebb hibával kövesse az yA(t) alapértéket (követési feladat), és a lehető legnagyobb mértékben és gyorsan hárítsa el az uz(t) zavarásnak az y(t) szabályozott jellemzőre vonatkozó nemkívánatos hatását (zavarelhárítási feladat).
A soros kompenzációs, egyváltozós szabályozási rendszer
A szabályozási rendszer esetében mind a folyamatot, mint pedig a szabályozó berendezést egy-egy linearizált matematikai modellel (állapotegyenlet vagy átviteli mátrix) jellemezhetjük, és ezek felhasználásával tudjuk a zárt rendszeregyensúlyi pontjának környezetében lejátszódó dinamikus tulajdonságokat tanulmányozni. Egyszerűen tárgyalhatjuk a lineáris szabályozási rendszer alapvető tulajdonságait, ha az alrendszereket differenciálegyenleteik helyett az átviteli függvényeikkel és az ehhez rendelhető hatásvázlattal jellemezzük (3. ábra). A szabályozóberendezés esetében ez az yA(s) alapértéket (set point), valamint az y(s) szabályozott jellemző tényleges értékét (controlled variable) mint bemenőjeleket; és az u(s) irányítójelet (control signal) mint kimenőjelet tartalmazó alrendszert (amikor is
u(s)=Wc(s)[yA(s)-y(s)])
jelenti. A folyamat esetében az u(s) irányítójel, valamint az uz(s) zavarójelek (disturbance, noise) a bemenőjelek, és az y(s) szabályozott jellemző a kimenőjel az ezeket tartalmazó alrendszerben:
y(s)=Wp(s)u(s)+Wz(s)uz(s).
Az alrendszerek az u(s) irányítójel és az y(s) szabályozott jellemző közvetítésével egymással szoros csatolásban vannak. Az s operátortartományban algebrai egyenletekkel dolgozhatunk, de ennek ára, hogy az állapotváltozók alakulásáról közvetlenül nem tájékozódhatunk, illetve a megoldásokat is (a t időtartomány helyett) az s operátortartományban kapjuk (sok gyakorlati esetben az állapotváltozók ismeretére egyébként nincs is szükség, és az operátortartományban kapott megoldásokból is több fontos következtetést vonhatunk le).

3. ábra A klasszikus, soros kompenzációs, lineáris szabályozási
rendszer hatásvázlatai
Jelentős gyakorisággal a folyamat Wp(s) és Wz(s) átviteli függvényei önbeálló, aszimptotikusan stabilis tagokat definiálnak, aminek jelentése szerint az ugrásszerűen változó u01(t), uz01(t) állandó bemenőjelekre olyan y(t) válasz keletkezik, amely t→∞ esetén y0 állandó értékhez tart. A szabályozó tulajdonságai – ezzel ellentétben – általában integráló jellegűek, amit a maradó szabályozási eltérés megszüntetésének követelménye igényel. Ennek jelentősége az, hogy a szabályozó mindaddig változtatja az u(t) irányítójelet, amíg a h(t) hibajel zérussá nem válik. Az eredő rendszer bemenőjelei az yA és uz jelek (külső jelek, excitation), kimenőjeleknek pedig vegyük fel az üzemtani szempontból lényeges szerepet betöltő y szabályozott jellemzőt, az u irányítójelet és h=yA-y hibajelet (belső jelek, internal signals). A hatásvázlaton szereplő tagok – az összegző tagokat kivéve – mindegyike ugyan SISO-tag, az eredő rendszert azonban két bemenőjellel (yA, uz), három kimenőjellel (y, u, h) rendelkező és a WR(s) átviteli mátrixszal reprezentált MIMO-tag írja le. A hatásvázlat alapján – a jelek közötti függvénykapcsolatokat az sLaplace-operátortartományban értelmezve – az alrendszerek matematikai modelljei:

A folyamatot leíró (a) egyenletben a Wp(s) és Wz(s) átviteli függvények azt mutatják, hogy az y(s) szabályozott jellemzőt miként befolyásolja az u(s) irányítójel és az uz(s) zavarójel, a szabályozási algoritmust reprezentáló Wc(s) pedig azt fejezi ki, hogy az u(s) irányítójel miként függ a h(s) hibajeltől, ami viszont az yA(s) alapérték és az y(s) tényleges érték különbsége. Az (a) egyenlet Δy(s)n=Wz(s)uz(s) tényezője annak mértékét jelenti, hogy az uz(s) zavarójel milyen és mekkora befolyást gyakorol (nemkívánatosan) az y(s) szabályozott jellemzőre akkor, ha a szabályozó nem változtatná meg az u(s) irányítójelet. Ezt a nemkívánatos hatást (az u irányítójel megfelelő mértékben történő szándékolt megváltoztatásával) a szabályozó közömbösíteni igyekszik, és jól méretezett rendszer esetében – legalábbis a stabilis szabályozási rendszer egyensúlyi állapotában – a teljes mértékű zavarelhárítást végre is hajtja. A hatásvázlatot felépítő tagokat leíró egyenletek alapján egyszerű algebrai átalakítással kaphatjuk, hogy a zárt szabályozás mellett az y(t), u(t) és h(t) belső jelek (pontosabban ezek y(s), u(s) és h(s) Laplace-transzformáltjai) miként függnek az yA(s) és uz(s) külső gerjesztések transzformáltjaitól. A visszacsatolt rendszer eredő matematikai modelljét – a WR(s) átviteli mátrix alakjában – egyszerűen előállíthatjuk.
Az y(s), u(s) és h(s) belső jelek (mint ahogy az a szabályozási rendszer hatásvázlatából is kiolvasható) az yA(s) és uz(s) külső jelek (a gerjesztések) függvényei. Bevezetve a W0(s)=Wc(s)Wp(s) jelöléssel a „nyitott hurok” eredő átviteli függvényét az s Laplace- operátor tartományában felírt rendszeregyenletek alapján kaphatjuk, hogy:

Ez a képlet szemléletesen és tömören mutatja a két bemenő-, és három kimenőjelű eredő szabályozási rendszer MIMO-taggal leírt átviteli mátrixát, ezen belül például azt, hogy a zárt rendszer matematikai modelljében a szabályozott jellemző tényleges y(s) értéke miként függ az yA(s) alapértéktől (az y(s) előírt értékétől, a referenciajeltől) és az uz(s) zavarójeltől:

Ebben a kifejezésben a Δy(s)n=Wz(s)uz(s) tényező mutatja azt, hogy a zavarójel milyen mértékű befolyást gyakorol a szabályozott jellemzőre szabályozás nélkül, illetve hogy ezt a nemkívánatos hatást az aszimptotikusan stabilis szabályozás zárt hatáslánca
![]()
mértékben – a W0(s) nyitott köri átviteli függvény célirányos és megfelelő megválasztása esetében – csökkenteni (a rendszer állandósult állapotában esetleg megszüntetni is) képes. A szabályozási rendszer tanulmányozása során felmerülő fontosabb kérdések:
• Milyen matematikai modellekkel írhatók le a szabályozási hatásláncban szereplő fizikai objektumok, milyen tartományokra terjed ki a matematikai modell érvényessége, és a paraméterváltozások milyen mértékben érintik ezt az érvényességet (modell-alkotás)?
• A folyamat és a szabályozó ismert matematikai modelljei mellett a célszerűen megválasztott determinisztikus yA(t), uz(t) gerjesztésekre a zárt rendszer milyen y(t), u(t), h(t) válaszokat ad (rendszeranalízis determinisztikus vizsgálójelekre)?
• Adott folyamat és szabályozó matematikai modellek mellett, yA01(t), uz01(t) ugrásalakú determinisztikus gerjesztésekre a zárt rendszer y(t), u(t), h(t) válaszainak t→∞ mellett létrejön-e az y0, u0, h0 állandósult egyensúlyi értéke (stabilitásvizsgálat)?
• Ismert folyamatmodell esetében milyen lehetőség van arra, hogy a folyamat u(t) bemenőjelének túlvezérlésével a tranzienseket lerövidítsük, a túlvezérléssel történő gyorsításnak milyen korlátai vannak (a tranziensek befolyásolása az irányítójel túlvezérlésével)?
• Használható-e a rendszer analízisére a munkaponti linearizálás és a méretezésre a vizsgálatok „frekvencia módszere” (a rendszer linearitási tartományának vizsgálata)?
• Adott folyamatmodell mellett hogyan kell megtervezni a szabályozó matematikai modelljével reprezentált szabályozási algoritmust, hogy az eredő zárt rendszerben az alapérték követésére és a zavaró jeleknek a szabályozott jellemzőre gyakorolt nem-kívánatos hatásának mérséklésére (a zavarelhárításra) vonatkozó követelmények teljesüljenek (a szabályozó rendszertechnikai – modell alapú – méretezése)?
• Milyen hatása van a folyamat paraméterváltozásainak a zárt rendszer statikus és dinamikus tulajdonságaira, a szabályozó paramétereinek üzem közben történő módosításával hogyan lehet a paraméterváltozásokat figyelembe venni (érzékenység, robusztusságanalízise, adaptivitás tervezése)?
• Milyen legyen a rendszertechnikailag megtervezett és a szabályozási algoritmust realizáló fizikai objektum (a szabályozó berendezés hardver tervezése)? stb.
Mindezekre a cikksorozatban igyekeztünk részletes válaszokat adni.
A zárt szabályozási rendszerrel szemben támasztott stabilitási igény és a megfelelő mértékű stabilitási tartalék kielégítése alapkövetelmény. A lineáris, zárt hatásláncú rendszer stabilitásának feltétele, hogy az eredő AR állapotmátrixának λRi sajátértékeit meghatározó det(λI-AR) karakterisztikus polinomjának minden λRi gyöke negatív valós résszel rendelkez-zen. Vagy ezzel egyenértékűen a W0(s)=G0(s)/H0(s) nyitott köri átviteli függvényből képezhető és a zárt kör stabilitását meghatározó HR(s)=H0(s)+G0(s)=0 karakterisztikus egyenlet gyökei (a zárt rendszer
WR(s)=GR(s)/HR(s)=G0(s)/[G0(s)+H0(s)]
eredő átviteli függvényének pRi=λRi pólusai) negatív valós részűek legyenek (lásd Hurwitz vagy Nyquist stabilitási kritériumokat és Evans gyökhelygörbe módszerét). A szabályozó alrendszerének vonatkozásában a labilitás rendszerint fennáll, mivel a szabályozó általában visszacsatolatlan integráló fokozatot is tartalmaz (pl. I-, PI-, PID-szabályozók). Ez azt jelenti, hogy állandó h>0 hibajel mellett az integráló fokozatot tartalmazó szabályozó kimenőjele minden határon túlmenően növekszik. Ettől eltérően a folyamatok jelentős részben önbeálló tulajdonsággal rendelkeznek (vagyis aszimptotikusan stabilisak), de általános érvényűnek tekinteni ezt sem lehet. Mindezen tulajdonságok mellett a zárt rendszernek természetszerűen aszimptotikusan stabilisnak kell lennie.
A szabályozó rendszertechnikai méretezése
A szabályozás rendszertechnikai méretezésének során az ismert dinamikus tulajdonságokkal rendelkező és a Wp(s) átviteli függvényével leírt folyamathoz olyan, Wc(s) átviteli függvénnyel jellemzett szabályozási algoritmust kell meghatározni, amelynek alkalmazásával a zárt rendszerre megfogalmazott követelmények, minőségi előírások teljesülnek. Ezeket a követelményeket rendszerint a zárt szabályozás yA(t)=1(t) alapértékre vonatkozó eredő y(t)=vR(t) átmeneti függvénye alapján, vagy a WR(s)=W0(s)/[1+W0(s)] alapjelre vonatkozó eredő átviteli függvény pRi<0 domináns pólusainak eloszlására vonatkozó előírások teljesítése szerint fogalmazhatjuk meg. Általános követelmény, hogy a zárt szabályozási rendszer y(t) szabályozott jellemzőjének a lehető legkisebb h(t) hibával kell követnie az alapjellel definiált yA(t) alapértéket (követés), és a lehető legnagyobb mértékben és gyorsan kell elhárítani az uz(t) zavaró jellemzőnek a szabályozott jellemzőre gyakorolt nemkívánatos hatását (zavarelhárítás).
Egy más – ritkábban alkalmazott – lehetséges méretezési eljárás olyan kritériumokat tartalmaz, amelyek teljesítésével egy J[x(t),u(t)] vagy J[y(t),u(t)] költségfüggvény minimalizálása a célkitűzés (LQR-szabályozás, és x(t) a folyamat állapotvektora, u(t) a folyamat bemenő- (irányító) -jele, y(t) az irányított jellemző). Bármilyen követelmény teljesítése is az előírás, ezek azáltal valósulhatnak meg, hogy a folyamat u(t) irányító- (bemenő) -jelét – egy célszerűen megválasztott szabályozási algoritmus segítségével – a kívánalmaknak megfelelő célok elérése szerint tervezzük. A folyamat tulajdonságainak alapvető sajátossága, hogy az irányítójellel létesített beavatkozás hatása a szabályozott jellemzőben inercia (jellemzői a tehetetlenséget kifejező Tpi>0 időállandók), és a jelterjedés véges sebessége miatt (jellemzője a Th>0 holtidő) késleltetéssel juthat érvényre. Az inercia típusú késleltetések az u(t) irányítójel egy megengedett mértékű és adott, rövid ideig tartó túlvezérlésével csökkenthetők, a holtidő okozta késleltetés azonban semilyen szabályozástechnikai eljárással nem befolyásolható. A szabályozó tervezője számára a folyamat holtideje egyébként is egy igencsak kellemetlen és nemkívánatos tulajdonság, miután az u irányítójel megváltoztatásának hatására a folyamat kimenetén Th ideig „nem történik semmi”, ami az u(t) irányítójel tervezésében és a rendszer stabilitásának biztosításában komoly gondokat okoz. A szabályozó rendszertechnikai méretezésének frekvenciamódszerét a cikksorozatban részletesen feldolgoztuk. A méretezés kapcsán tárgyalt egyéb struktúrák: kaszkád-szabályozás, állapotvisszacsatolás, zavarkompenzáció, Truxal–Guillemin-szabályozó, szabályozás Smith-szabályozóval, a szabályozó tervezésének polinomiális módszere, állásos szabályozás.
Következtetések
Mint a korábbiakban láthattuk a szabályozó méretezésének alapfeltétele, hogy a folyamat differenciálegyenlete (matematikai modellje), illetve az ennek megfelelő Wp(s) átviteli függvénye (a differenciálegyenlet egy „más alakja”) ismert legyen. Ez az átviteli függvény az u irányítójel és az y szabályozott jellemző közötti jelátviteli tulajdonságokat írja le, és tartalmazza az egymással soros kapcsolást alkotó előerősítő, a teljesítményerősítő, a végrehajtó szerv, a helyzetbeállító, a beavatkozó szerv, a szabályozott technológiai folyamat, az érzékelő szerv, a távadó együttesének eredő dinamikus tulajdonságait. Ennek az átviteli függvénynek a meghatározása a legnehezebb feladat, nem ritkán kísérleti vizsgálat elvégzését (pl. az u bemenő- és az y kimenőjelek közötti átmeneti függvény felvételét, és ebből a matematikai modell meghatározását) igényli. Különös gondossággal kell eljárni az érzékelő szerv (sensor) kiválasztása során, mivel ennek pontossága a rendszer pontosságát is megszabja. Az érzékelés a szabályozási hurok visszacsatolási ágában van, és az y szabályozott jellemző és az ua alapjel közötti átviteli tényezőt az érzékelés AE átviteli tényezője szabja meg (állandósult állapotban y0≈ua0/AE). Hasonlóan gondos mérlegeléssel kell kiválasztani a folyamat módosított jellemzőjét (manipulated variable) és az ezt befolyásoló beavatkozó szervet (actuator), mivel ennek segítségével tudunk a szabályozott jellemzőre szándékolt befolyást gyakorolni. A beavatkozás többnyire energiaigényes feladat, ezért a beavatkozó szerv energetikai méretezést is igényel. Az érzékelő és a beavatkozó szervek un. terepi készülékek, szerkezeti-áramköri kialakításuknak ennek kell megfelelni. A szabályozási hatáslánc problémamentes része ma már maga a szabályozó (controller, regulator), mivel ezt egy szabadon programozható, ipari kivitelben készült digitális számítógép realizálja. Ennek paraméterei pontosak és időállóak. A korábbi évtizedekben ez nem volt így, mivel a szabályozót is folytonosidejű jelekkel működő áramkörök, szerkezetek realizálták (elektronikus, pneumatikus, hidraulikus szabályozók). Magában a hatásláncban szereplő egyes szervek önmagukban is visszacsatolást tartalmazó dinamikus rendszerek (pl. a helyzetbeállító, a teljesítményerősítő, az érzékelő szerv, a tápegység, hidraulikus és pneumatikus szerkezetek vagy az A/D-átalakítók egyes típusai stb.), ezért dinamikus tulajdonságaiknak alakításában mindazok a módszerek, amelyek a teljes szabályozási rendszer analízisében és szintézisében felhasználásra kerülnek, a részelemek tervezésében is meghatározó szerepet kapnak.
Az analízist, a tervezést és a szimulációt támogató számítógépes rendszerek
A folytonosidejű, a diszkrétidejű és a hibrid szabályozási rendszerek analízise során – a szabályozó és a folyamat matematikai modelljeinek ismerete alapján – általában magas rendszámú differenciálegyenletek vagy differenciaegyenletek megoldásait kell a determinisztikus vizsgálójelekre (pl. Dirac delta, egységugrás, sebességugrás, harmonikusjelek) meghatározni. Ennek során rendszerint az adott yA(t) alapjel és uz(t) zavarójel mellett a h(t) hibajel, az u(t) irányítójel és az y(t) szabályozott jellemző időfüggvényeinek kiszámítása a feladat. A szintézis esetében az ismert folyamatmodell mellett és a zárt rendszerre megfogalmazott követelmények alapján olyan szabályozási algoritmus, illetve a szabályozó alrendszerének szerkezeti–áramköri megtervezése a célkitűzés, amelynek alkalmazásával a zárt rendszer az előírt követelményeknek megfelelő tulajdonságokkal rendelkezik. A számítógépek által nyújtott szolgáltatások megjelenése előtt mind az analízis, mint pedig a szintézis – a számítások munkaigényessége miatt – igen hosszadalmasak és fáradságosak voltak. Ha a matematikai modell megfelelő pontossággal írja le a szabályozási rendszer alrendszereinek (és ez által, magának a teljes zárt rendszernek is) a tulajdonságait, a paraméterváltozások hatásainak nyomonkövetésére a számításokat sokszor kellett megismételni. Az időtartományból az operátortartományra történő áttérés (a Laplace- és Z-transzformációk) a lineáris rendszerek analízisében ugyan jelentős egyszerűsítést eredményeztek (az operátortartományban a differenciálegyenletek, illetve a differenciaegyenletek helyett algebrai egyenletekkel dolgozhatunk), de az időtartományba való visszatérés (az inverz transzformáció) továbbra is jelentős mértékű numerikus számítás elvégzését igényli.
A szabályozási rendszerek vizsgálatához nyújtott számítógépes szolgáltatások jelentősen megkönnyítették az analízis és szintézis eljárásait[1], ezek egyike a MATLAB® programrendszer által felkínált lehetőségek felhasználása. A MATLAB matematikai alapverziója kb. 250 függvényt, a Control System Toolbox több mint 100 függvényt tartalmaz.
A szabályozástecnika témáit tárgyaló cikksorozatban rendszeresen használtuk a MATLAB nyújtotta szolgáltatásokat, ezeket az Olvasó figyelmébe ajánljuk. Reprodukálásuk révén egyszerűen megismerkedhetünk a MATLAB használatával, ennek előnyeivel, megkímélve magunkat a fáradságosan végezhető, jelentős mennyiségű numerikus számításoktól. Nem tekinthetünk el azonban attól, hogy ez a programrendszer – némi túlzással – lényegében egy igen hasznos, intelligens „logarléc”, ami segítségünkre van a legbonyolultabb és hosszadalmas numerikus számításokban, ezeket igen gyorsan, nagy pontossággal gépi úton végrehajtja. Bár a programozás során vétett szintaktikai hibákról hibaüzeneteket küld, gondolkozni azonban az alkalmazó helyett nem képes, ezért a MATLAB által szolgáltatott eredményeket csak megfelelő kritikával szabad elfogadni.
Említésre érdemes a SIMULINK grafikus programcsomag[2] is, amely a hatásvázlatával (blokk-diagramjával) definiált dinamikus rendszer szimulációját közönséges differenciálegyenletek különféle numerikus megoldásaival végzi. A hatásvázlat jelátvivő tagjait – mintegy a bemenő- és kimenőjelek közötti matematikai műveleteket definiáló blokkokat – a SIMULINK programkönyvtárból lehet kimásolni (Sources, Sinks, Discrete, Linear, Nonlinear, Connections Block Library ). Ezek a blokkok az FI és DI alaptagokon túlmenően tetszőleges rendszámú lineáris, nemlineáris tagokat, matematikai műveleteket végző tagokat, állapotegyenletével leírt tagot, holtidős tagot, zérusrendű tartószervet, jelgenerátorokat, a jeleket regisztráló „virtuális műszereket”, adattárolókat stb. tartalmaznak. A könyvtárból kiválasztott blokkokat a képernyő programozási felületére lehet „vonszolni”. A blokkokat a hatásvázlatnak megfelelő elrendezésben – az egérrel húzott vonalakkal – kell „összehuzalozni”, ami az egyik blokk kimenetét egy másik blokk bemenetével történő összekapcsolását szimbolizálja. Az egyes blokkok bemeneteire más blokkok kimeneteit vagy a jelgenerátorok által szolgáltatott vizsgáló jeleket lehet „kapcsolni”, illetve a megfelelő kimeneti pontokra más blokkok bemeneteit vagy a regisztráló eszközöket lehet „rákötni”. A SIMULINK grafikus eszközei egyszerűvé és áttekinthetővé teszik a dinamikus rendszerben lejátszódó jelenségek nyomonkövetését, a kísérletek tetszőleges számban ismételhetőek, a hatásvázlat blokkjai egyszerűen parametrizálhatók. A szimuláció eredményeit – további számításokra és jelfeldolgozásra – a MATLAB felületre is át lehet adni. Grafikája szemléletessé teszi a folytonos, a diszkrét és a hibrid rendszerekben a gerjesztések hatására kialakuló jelenségek áttekintését. Alkalmazásának jelentős előnye, hogy nemlinearitások, holtidős késleltetések, FI, DI és hibrid hatásvázlat-struktúrák egyaránt vizsgálhatók[3].
Korábban ezekre a vizsgálatokra az elektronikus műveleti erősítőkből felépülő analóg számítógépeket (ezeket differenciálegyenlet-megoldó gépnek is nevezték) alkalmaztak. Mára az analóg számítógépeket – a kísérleti vizsgálatokat mintegy a „virtuális világba” helyezve – a digitális modellezés szinte teljesen kiszorította. A digitális gépeken az egyes egységeket (blokkokat) a számítógépen futó programok realizálják, íly módon a pontosságot az alkalmazott numerikus módszerek és ezek számítási lépésköze befolyásolja (a „drift” jelenségével itt nem kell számolni, viszont a helytelenül megválasztott lépésköz pontatlansághoz, szélsőséges esetben numerikus instabilitáshoz vezethet). A szimulációs program összeállítása – az analóg számítógép programozásához képest – kényelmesebb, a különféle blokkok parametrizálása, az amplitúdó- és időléptékezés megoldása lényegesen egyszerűbb. Tetszőleges vizsgálójelek alkalmazhatók, a struktúra bármely pontjára „virtuális” jelregisztráló (egy- és kétsugaras oszcilloszkóp, XY-regisztráló, adattároló stb.) helyezhető. A digitális szimulációnak egyetlen – de könnyen felejthető – hátrányát lehetne megemlíteni, nevezetesen azt, hogy a problémamegoldást a valóságtól még inkább elvonatkoztatja és az absztrakció további elmélyítésének irányába tereli. A szintaktikailag helyesen összeállított MATLAB program vagy SIMULINK szimuláció a számítógépen lefut, még abban az esetben is, ha valamelyik utasítást vagy blokkot esetleg tévesen paramétereztük (pl. egy paramétert helytelen előjellel adtunk meg stb.). A futási eredményeket ezért minden esetben hihetőségi vizsgálatnak is alá kell vetnünk, ami azt jelenti, hogy a modellezett fizikai rendszerben lejátszódó jelenségekről (a szimuláció valószínűsíthetően várható eredményeiről) elképzelésekkel kell rendelkeznünk. A számítások pontosságát alapvetően befolyásolja a szimuláció numerikus módszere és ennek választható lépésköze. A kis lépésköz nagyobb pontosságot, de hosszabb számítási időt és jelentős költségtöbbletet jelent. A SIMULINK® használatával történő megismerkedést is az Olvasó figyelmébe ajánljuk, mivel ennek használata – túlmutatva a szabályozástecnikai alkalmazásokon – a dinamikus rendszerek analízisét igen szemléletessé és hatékonnyá teszi. Megismerésére irodalmi hivatkozást adtunk. A szabályozás rendszertechnikai méretezése során is érdemes a MATLAB szolgáltatásainak igénybevétele. A méretezés – a folyamat ismert Wp(s)=Gp(s)/Hp(s) átviteli függvényének és a méretezési előírások alapján – a szabályozó Wc(s)=Gc(s)/Hc(s) átviteli függvényének meghatározását jelenti. Illusztrációként megadjuk a méretezés eredményének ellenőrzésére szolgáló egyik lehetséges programot. A méretezést követően a méretezett szabályozó adatai mellett célszerű kiszámítani a nyitott kör
W0(jω)=Wc(jω)Wp(jω)=G0(jω)/H0(jω)
frekvenciafüggvényének gm(ωp) erősítési tartalékát (gain margin), a pm(ωc) fázistartalékát (phase margin), a ωp körfrekvenciát és az ωc vágási körfrekvenciát (cut-off), a zárt rendszer WR(s)=GR(s)/HR(s) eredő átviteli függvényét és ennek pR pólusait, valamint a zárt rendszer egységugrás alapjelre vonatkozó h(t), u(t), y(t) időfüggvényeit. Ezeket a számításokat számítógépes szolgáltatások nélkül elvégezni igen körülményes és fáradságos lenne. A következő rövid MATLAB utasítás-sorozat azt illusztrálja, hogy ezek a viszonylag komplikált számítások MATLAB támogatással igen egyszerűen elvégezhetők:
% analizis.m fájl
% ***************
% adatbevitel
Gp=input(’Gp=’);Hp=input(’Hp=’);
Gc=input(’Gc=’);Hc=input(’Hc=’);
% --------------------------
% a nyitott hatáslánc
[G0,H0]=series[Gc,Hc,Gp,Hp);
[G0,H0]=minreal[G0,H0);
[a0,f0,w]=bode(G0,H0);
[gm,pm,wp,wc]=margin(a0,f0,w);
% --------------------------
% a zárt hatáslánc
[GR,HR]=cloop(G0,H0);
pR=roots(HR);
[h,x,t]=step(feedback(1,1,H0,G0));plot(t,h);
[u,x,t]=step(feedback(Gc,Hc,Gp,Hp));plot(t,u);
[y,x,t]=step(GR,HR);plot(t,y);
% ***************
disp(’az ellenőrzés vége’);
A programot a programkönyvtárban lehet tárolni az analizis.m fájl néven. A MATLAB prompt után az analizis beírásával és (enter) billentyűzés után indul a program futása. Ennek során bekéri a folyamat Wp(s)=Gp/Hp és a szabályozó Wc(s)=Gc/Hc átviteli függvényei Gp, Hp, Gc, Hc polinomjainak együtthatóit (input), ezekből meghatározza a nyitott kör W0(s)=GcGp/(HcHp)=G0/H0 átviteli függvényét (series), ennek Bode-diagramjait (bode), amplitudótöbbletét és fázistöbbletét (margin), a zárt kör WR(s)=W0/(1+W0)=GR/HR átviteli függvényét (cloop), ennek pR pólusait (roots), valamint kiszámítja és ábrázolja a zárt rendszer egységugrás alapértékre vonatkozó y(t), u(t) és h(t) időfüggvényeit (step, feedback, plot). Az u(t) grafikonjából az ut=u(0)/u(∞) túlvezérlési arányra vonatkozó követelmény betartását ellenőrizhetjük, az y(t) grafikonjából képet kapunk arról, hogy az egységugrás alapértékre a zárt rendszer milyen választ ad és mekkora a zárt rendszer átmeneti függvényének túllendülése. Ha ezt kiegészítve elkészítjük a szabályozási rendszer SIMULINK-alapú szimulációját is, az előző programfutás eredményeit ezzel is ellenőrizhetjük, de módunk adódik arra is, hogy a hatásláncba nemlineáris elemeket (pl. a telítést, érzéketlenségi sávot stb.) is beiktassunk, és a kísérleti vizsgálatokat a módosított hatáslánc jelenségeire is kiterjesszük. A számítógépes szolgáltatás lehetősége nélkül ezek a számítások igen nehézkesek és fáradságosak lennének.
Befejezésként tisztelettel kell megemlékeznünk azokról a már közülünk eltávozott, de mérnöki szemléletmódjukat tanítványaikra hátrahagyott kollégáinkról, akik a szabályozástechnika és szabályozáselmélet hazai megalapozásának úttörői voltak. Száday Rezső a Láng gépgyár főkonstruktőre a szabályozástechnika és a turbinaszabályozások témaköreiben írta az első, gépészmérnökök számára készült magyar nyelven megjelenő „A szabályozáselmélet elemei” (Műszaki Kiadó) című könyvét, amelyet a Műegyetem Gépészmérnöki Karán egyetemi tankönyvként is használtak. Szalay József a hidraulikus és a segédenergia nélkül működő szabályozók témáinak feldolgozásával jelentős mértékben keltette fel az érdeklődést a szabályozástechnika iránt. Frigyes Andor vezetésével alakult meg a Budapesti Műszaki Egyetem Villamosmérnöki Karán a Folyamatszabályozási Tanszék, ahol súlyponti tématerület az ipari folyamatok méréstechnikája, a szabályozástechnika és a digitális technika oktatása és kutatása volt. Ezek művelésében Török József személyisége és széles skálán mozgó alkotásai meghatározó jelentőséggel bírtak. Szintén a Műegyetemen Csáki Frigyes alakította meg az Automatizálási Tanszéket. Csáki Frigyes irodalmi munkássága révén mérnökgenerációk jutottak hozzá a legkorszerűbb szabályozáselméleti és szabályozástechnikai ismeretanyaghoz, és e művek mind a mai napig a témát művelők könyvtárainak becses értékei. A Ward–Leonard hajtás jelentette azt a szabályozástechnikai mintarendszert, amin az elvek és a gyakorlat egysége igen szemléletesen volt bemutatható. A Kovács Károly Pál akadémikus vezette Villamosgépek Üzemtana Tanszéken dolgozott Rácz István, akinek a hajtásszabályozások területén elért nemzetközileg jegyzett tudományos eredményei általános érvényességükkel a szabályozáselmélet egészére is befolyást gyakoroltak. Fodor György jelek és rendszerek témakörében megjelentetett munkái jelentős mértékben segítették a közös nyelv és terminológia, valamint a folytonosidejű és a diszkrétidejű rendszerek egységes szemléletének kialakítását. Jelen munka szerzői Frigyes Andor tanítványainak vallják magukat, remélve, hogy mesterünk szemléletmódjából, az ismeretanyag átadásának igényéből, a bonyolult elméleti kérdések igen egyszerű példákon történő bemutatásának módszertanából, az elmélet és a gyakorlat egységének igényéből, sikerült az Olvasó számára is átörökíteni a fontosabb elveket és módszereket. A Csáki Frigyes, Fodor György, Frigyes Andor, Rácz István, Szalay József, Száday Rezső, Török József által hátrahagyott szakmai örökségnek méltó hazai utódai és követői vannak. Jelenleg is számos akadémikus, a tudományok doktora, a tudományok kandidátusa, PhD fokozattal rendelkező kutató és oktató – és legfőképpen az ipari gyakorlatban a szabályozási rendszereket fejlesztő-üzemeltető és nap, mint nap megújító mérnökök és technikusok sokasága – műveli ezt a tudományágat. A technológiai folyamatok irányításának valóságos fizikai környezetében születnek meg azok a tapasztalatok, problémák, amelyeknek megoldásai viszik előre a szabályozástechnika tudományágának igazi fejlődését.
Az ipari folyamatok területeien jelentkező és gyakorlati orientáltságú szabályozási problémák megoldásai indították el az általános rendszerelméleti kutatásokat is, amelynek eredményei előbb-utóbb a gyakorlati megoldásokban is megjelennek. A rendszerelméleti témák jelentős mértékben igénylik a matematika módszertanának és eredményeinek alkalmazását, nem véletlen, hogy a rendszerelmélet témaköre a matematikai kutatásokban is az érdeklődés előterébe került. A technikusi körökben ez nem aratott osztatlan sikert, mivel a matematika nyelvezete, terminológiája, annak mindenek fölötti egzaktságra való törekvése nem mindig illeszkedik a mérnöki szemléletmódhoz és a gyakorlati problémák megoldásának módszertanához. Az azonban tagadhatatlan tény, hogy a matematikusok (és a rendszerelmélettel foglalkozók) által keltett „elméleti özönvíznek” is lett olyan hozadéka, amely valós eredményeket jelentett, és a technikusokat is az elméleti eredményeknek a gyakorlatban történő alkalmazására, és további fejlesztésekre inspirálta.
A műszaki területeken kialakult szabályozástechnikai és szabályozáselméleti témák feldolgozása más tudományterületekre is hatást gyakoroltak, a rendszerelmélet ma már az informatika, az élettan, a biológia, a gazdaságtan, a szociológia stb. tudományokban is egyre jelentősebb szerephez jut. Felismerve, hogy az élő biológiai szervezetben lejátszódó folyamatok bonyolultsága és ebben az agy irányító szerepe milyen jelentőséggel bír, napjaink egyik legfontosabb kutatási tématerülete az élettani irányítások vizsgálata. Az élő szervezetben lejátszódó folyamatok irányításának bonyolultsága a technikai területek irányításának bonyolultságától nagyságrendekkel komplikáltabbak, a jelátviteli viszonyok elektrokémiai folyamatokban realizálódnak. Annak feltérképezése, és a hatásmechanizmusainak leírása, hogy az emberi agy, mint központi irányító szerv miként hajtja végre (a saját magát is magába foglaló) élő szervezetnek, mint az irányított folyamatnak az irányítását, egyelőre nem tűnik még hosszú távon sem megoldhatónak (az emberi szervezet kb. 1014 számú, egymással kommunikáló sejtből álló hálózat, és ezek önmagukban is komplikált biológiai alrendszerek). Az emberi agy szerkezete óriási komplexitással rendelkezik, kb. 100 milliárd idegsejtet (neuront) tartalmaz. Ezek is összetett hálózatot alkotnak, és kb. 1000 milliárd szinapszison (idegi kapcsolaton) keresztűl kapcsolódnak egymáshoz. Az egész agy alhálózatokat alkotó részrendszerekre is felosztható, és ezek is hálózatszerűen kommunikálnak egymással. Az az elképzelés, hogy a technikai irányításokra kidolgozott módszerek és az ezek alapján megszületett eredmények adaptálhatók az élettani folyamatok irányításának leírására, ma még csupán kezdetleges elképzelések és reménykeltő várakozások. Hosszú távon valószinűsíthető annak a visszacsatolásnak a színrelépése, amikor az agyműködés és az élettani kutatásban születő eredmények a technikai irányításokban kerülhetnek alkalmazásra. Egyelőre az irány fordított, és nem kizárt, hogy egy paradigmaváltásnak kell jönnie ahhoz, hogy ez az irányultság megforduljon.
Az élettani szabályozások kutatásának hazai elindítói Csáki Frigyes, Szentágothai János akadémikusok és munkatársaik voltak. Az agykutató Szentágothai professzor az 1960-as években igényelte első ízben, hogy a műszaki terüleken alkalmazott irányítástechnika rendszertanával ő maga személyesen is megismerkedjen. Szentágothai János és Szűcs Béla együttműködésének eredményeként a sajátos élettani szabályozások feltérképezésében és modellezésében kiemelkedő eredményeket is felmutató kutatások folytak. Ezt követően kezdett a kutató orvosok egy részének a figyelme az irányításelmélet irányába fordulni, miközben az irányítástechnikával foglalkozó mérnökök is egyre nagyobb érdeklődést mutattak az orvostudományok iránt. Ez napjainkra az orvostudományi, a természettudományi, és a műszaki egyetemek közötti szervezett együttműködéshez vezetett.
A szabályozástechnika gyakorlati és elméleti témakörének óriási hazai és külföldi irodalma van. Ezek egy részére a megfelelő helyeken többször is hivatkoztunk. A szerzők szubjektív véleménye, hogy a lineáris szabályozások témakörét tárgyaló és a legjobb elméleti–gyakorlati áttekintést adó szakkönyvek Benjamin C. Kuo: Automatic Control Systems, és Digital Control Systems (Saunders Collage Publishing) művei. Ezekből a folytonosidejű rendszereket tárgyaló, Önműködő szabályozó rendszerek (Műszaki Kiadó) könyv magyar nyelven is hozzáférhető. A szabályozási rendszerekről jó összeállítást tartalmaznak Winfried Oppelt: Ipari szabályozások kézikönyve. (Műszaki Könyvkiadó), Dr. Helm László: A szabályozástechnika kézikönyve (Műszaki Könyvkiadó) és Hütte: A mérnöki tudományok kézikönyve (Springer Hungarica) című munkák. Három elméleti orientáltságú kiváló munka: Fodor György: Jelek és rendszerek (Műegyetemi Kiadó), Csáki Frigyes: Szabályozások dinamikája (Akadémiai Kiadó) és Jean–Pierre Corriou: Process Control. Theory and Applications (Springer). A matematikai alapfogalmak igen jó összefoglalása található I. N. Bronstejn–K. A. Szemengyajev Matematikai kézikönyv (Müszaki Könyvkiadó), és Dr.Farkas Miklós: Matematikai kislexikon (Műszaki Könyvkiadó) művekben. Az élő szervezetek rendszertecnikai leírásának bonyolultságát és ennek tudományos megközelítését tartalmazó egyik figyelemre méltó mű Fritjof Capra: Az élet szövedéke (Avicor Kiadó).
A szerzők remélni szeretnék, hogy a feldolgozott szabályozástecnikai témák az Olvasó érdeklődésével is találkozzanak. Bizonyára „maradó hiba” a közölt anyagban is található, ha erre a szerzők visszajelzést kapnak, a javításra is sort kerítenek. Köszönet illeti a Magyar Elekronika folyóirat Kiadóját és Szerkesztőségének minden tagját, mivel egyrész lehetőséget teremtettek a cikksorozat megjelentetésére, másrészt a nehéz, tipográfiailag is körülményes szöveg nyomdakész előkészítését is kíválóan megoldották.
Vége
Balatonöszöd, 2014. augusztus 4.
Dr. Szilágyi Béla – Dr. Juhász Ferencné
[1] Az analízist és szintézist támogató különféle programcsomagok: Mathematica, Maple, SysQuake, LabView stb.
[2] Irodalom: James B. Dabney, Thomas L. Harman: Mastering SIMULINK®2. Prentice Hall. Hetthessy Jenő–Bars Ruth–Barta András: Szabályozástechnika MATLAB® gyakorlatok. Műegyetemi Kiadó.
[3] A MATLAB szolgáltatásaihoz hasonlóan kiváló lehetőséget teremt szabályozási rendszerek matamatikai modelljeinek analízisére, szintézisére és szimulációjára a National InstrumentsLabVIEW® programcsomagja is.













