



Szabályozástechnika 58
Hibrid szabályozás rendszertechnikai tervezése – 8
A Smith-szabályozó tervezése DI-modell alapján
Korábbi vizsgálataink során már tapasztaltuk, hogy a jelterjedés véges sebességéből származtatható és a folyamat késleltetésében jelenlévő Th holtidő – különösen, ha az a tehetetlenségi tulajdonságból származtatható Tp>0 időállandóival összemérhető – a folytonosidejű zárt szabályozási rendszer üzemelését jelentős mértékben veszélyeztetheti [1].
A H(s)=exp(-sTh) holtidőt szimbolizáló függvény ekkor a folyamat
Wp(s)=T(s)H(s) alakban felírható átviteli függvényének egyik tényezője [2]. A holtidő az irányítójel túlvezérlésével nem csökkenthető, a zárt rendszer y(t) kimenőjelében mindenképen jelen van. Figyelemreméltó tulajdonsága, hogy a nyitott kör W0(jω) frekvenciafüggvényének a0(ω) amplitúdómenetére hatása nincs, kizárólag a φ0(ω) fázismenetben hoz létre egy -ωTh additív komponenst. A Smith-szabályozóval kialakított FI-rendszer soros kompenzációs stratégiájának elvi lényege az, hogy abban az esetben, ha a folyamat Wp(s)=T(s)H(s) átviteli függvénye tényezőkre bontható, akkor a kompenzációs Wc(s) átviteli függvényű szabályozót T(s)[1-H(s)] átviteli függvényű taggal negatívan visszacsatolva (1.a. ábra) olyan egyenértékű struktúrához jutunk, amelyben a H(s) tényező mintegy a zárt hatásláncon kívülre kerül (1.b. ábra). Miután a holtidő okozta késleltetés a szabályozott jellemzőben mindenképen megmarad, ennek a „szabályozási hatásláncon kívülre történő helyezése” az y(t) időlefolyását nem befolyásolja de a Wc(s) méretezését jelentősen egyszerűsítheti [3].
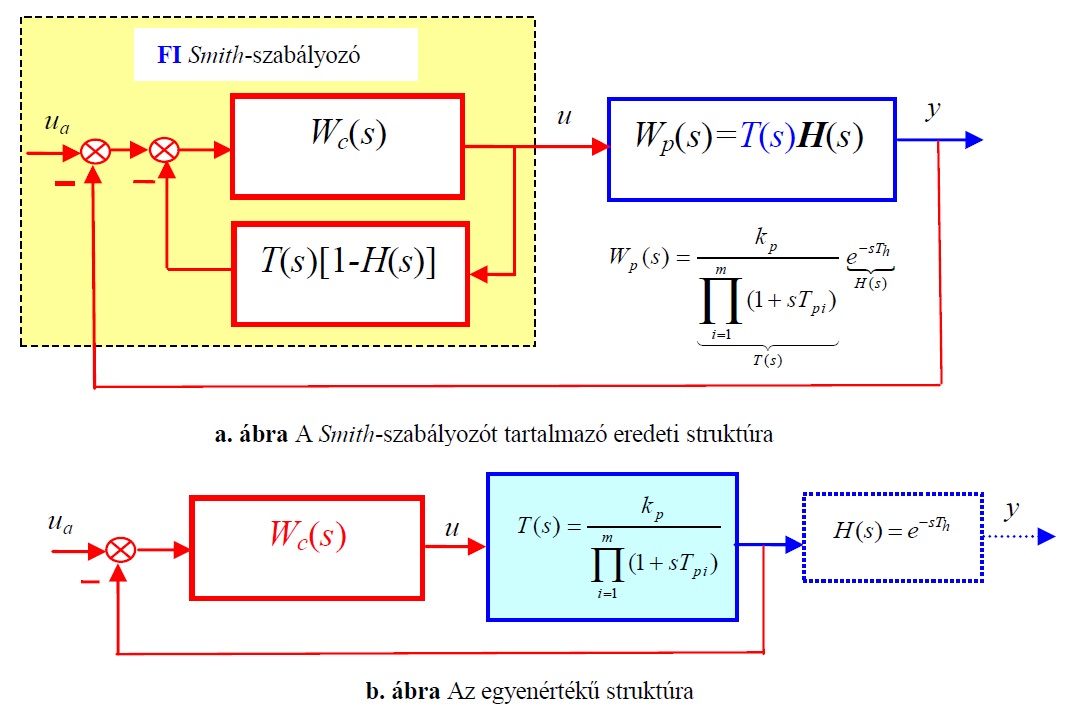
1. ábra A Smith-szabályozás hatásvázlata az FI-rendszerben
Az egyenértékű struktúra alapján a T(s) tényezőhöz kell méretezni a Wc(s) átviteli függvényű soros kompenzációt, majd az ily módon meghatározott Wc(s) átviteli függvényű tagot kell az 1.a. ábrának megfelelően a T(s)[1-H(s)] átviteli függvényű taggal negatívan visszacsatolni. A Smith-szabályozó szerkezeti–áramköri kialakítását is a 1.a. ábra struktúrája szerint kell létrehozni. Az eljárás előnye abban mutatkozik meg, hogy Wc(s) méretezésekor a H(s) tényező figyelmen kívül hagyható. Ennek „ára” a Smith-szabályozó körülményesebb realizálása. Folytonosidejű rendszerben a Smith-szabályozó szerkezeti–áramköri realizálása nehézkes, mivel a Wc(s) visszacsatolásában szereplő H(s) tényezőt is meg kell valósítani. Ha ez egy holtidős késleltetést jelent, akkor analóg elemekkel H(s)=exp(-sTh) nem (illetve csak Strejc- vagy Pade-közelítéssel) realizálható.
Az elv tényleges alkalmazásának megvalósítása nem jelent problémát, ha a hibrid rendszerben a szabályozót egy diszkrét szabályozási algoritmus realizálja, és a folyamat holtideje a mintavételezési idő egész számú többszöröse (Th=lTs). A diszkrét szabályozási algoritmus „realizálásakor” ugyanis a Th=lTs megvalósítása csupán l számú shiftelés soros alkalmazását igényi. A hibrid rendszer FI-folyamatának DI-modellje ekkor [4]:

Ebben vpT(kTs) a folyamat holtidő nélküli átmeneti mintasorozata. Ha a hibrid szabályozási rendszerben a Smith-szabályozót digitális számítógépen futó programmal kívánjuk realizálni, akkor a rendszer diszkrétidejű modellje alapján kell eljárnunk. Ezt a modellt a folytonos modell mintájára alakíthatjuk ki (2. ábra).
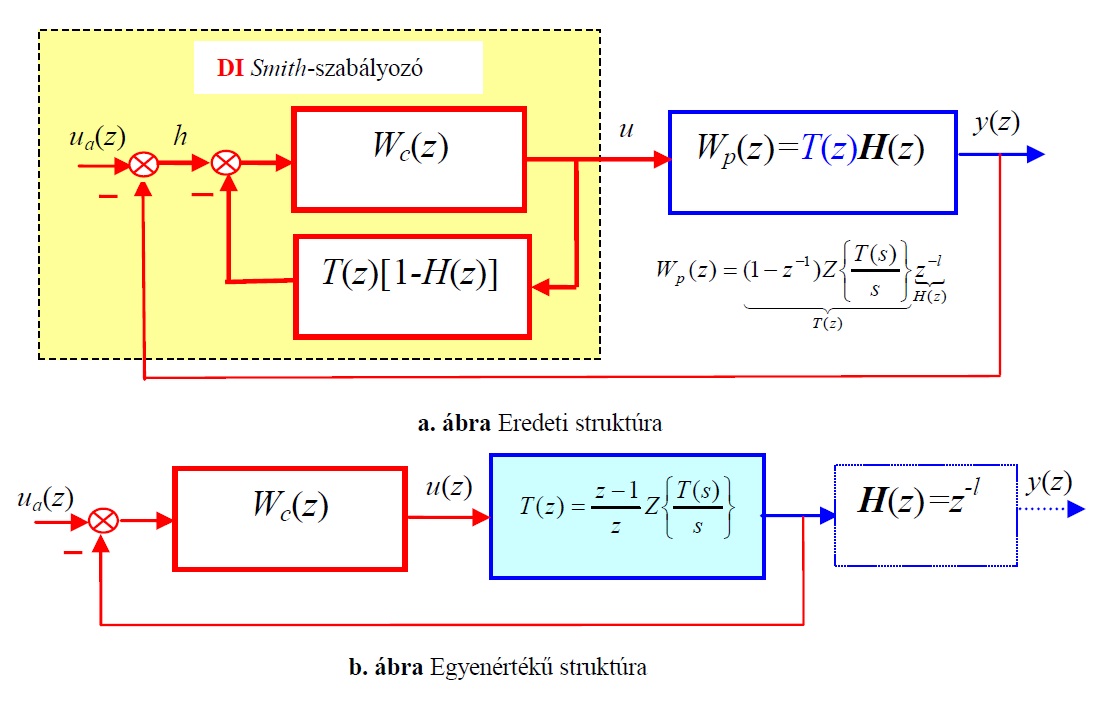
2. ábra Hibrid szabályozás DI-modellje Smith-szabályozóval
A hatásvázlat alapján a nyitott kör eredő impulzusátviteli függvénye:
![]()
A diszkrét alapjel és a diszkrét szabályozott jellemző között értelmezhető függvénykapcsolat ennek figyelembevételével:

Ez a modell is azt mutatja, hogy az adott struktúrában Wc(z) méretezésekor
H(z) figyelmen kívül hagyható, de az elv érvényre jutásához a T(z) tényezőhöz méretezett Wc(z) impulzusátviteli függvényű tagot T(z)[1-H(z)] impulzusátviteli függvényű taggal negatívan vissza kell csatolni. Most azonban a

impulzusátviteli függvényű Smith-szabályozót egy számítógépes program futása realizálja, amelybe a z-l eltolás figyelembevétele nem okoz realizálhatósági problémát.
Truxal–Guillemin-szabályozó hibrid rendszerben
Az FI-rendszerekhez hasonlóan hibrid szabályozások szabályozási algoritmusainak tervezése során is felhasználhatjuk a Truxal–Guillemin-elvet. Ennek lényege, hogy egy előzetesen követelményként definiált eredő zárt rendszer WRm(z) impulzusátviteli függvényhez (az előírt WRm(z) diszkrét rendszermodellhez) keressük azt a Wc(z)=WTG(z) szabályozási algoritmust, amellyel az adott Wp(z) folyamatot soros kompenzációban működtetve a WR(z)=WRm(z) követelmény kielégíthető. Most azonban az FI-folyamatmodellben megengedjük a Th holtidő jelenlétét is, mert ennek a digitális szabályozási algoritmusban történő realizálása – ha Th=lTs és l egész – egyszerűen megoldható. Miután a holtidő hatásának „eltüntetése” elvileg nem valósítható meg, ennek jelenlétét a WRm(z) eredő modellben is szerepeltetni kell. Lényeges kérdés a WRm(z) zárt rendszer eredő impulzusátviteli függvényének követelményként előírt felvétele. Ennek természetszerűen aszimptotikusan stabilis, önbeálló tagnak kell lennie, |zpR|<1 pólusainak gyors lefolyású tranzienseket kell eredményezni, az y(∞)=ua(∞)=yA(∞) feltételhez egységnyi átviteli tényezővel kell rendelkeznie, és nem utolsósorban olyan szabályozási algoritmushoz kell elvezetnie, amely realizálható. Mindezekre való figyelemmel legyenek a folyamat adott, illetve a zárt rendszer méretezési követelményként előírt impulzusátviteli függvényei az alábbiak:

A GTp(z)/HTp(z) most a holtidő nélküli folyamat impulzusátviteli függvényét jelenti, miután a holtidőt a z-l tényező képviseli. A rendszer hatásvázlata a 3. ábrán látható.

3. ábra Truxal–Guillemin szabályozási struktúra
A hatásvázlat alapján a nyitott és a zárt hatáslánc eredő impulzusátviteli függvényei:

Az utóbbi egyenletből:

A teljes struktúra hatásvázlaton történő szemléltetetését a 4. ábra tartalmazza.

4. ábra A zárt rendszer előírt tulajdonságait megvalósító szabályozás struktúrája
A WRm(z)=GRm(z)z-l/HRm(z) diszkrét rendszermodell felvételekor – mint már említettük – körültekintően kell eljárni, mivel a zárt rendszer stabilitásán túlmenően a WTG(z) impulzusátviteli függvény realizálhatóságára is tekintettel kell lenni, miközben a szabályozó egyik tényezőjét képező HTp(z)/GTp(z) (inverz) algebrai tört – a HTp(z) polinomnak a GTp(z) polinomnál magasabb fokszáma miatt – általában nem realizálható.
Folytatjuk!
Szerzők: Dr. Szilágyi Béla – Dr. Juhász Ferencné
[1] Ismételten megjegyezzük, hogy egy olyan FI-szabályozási rendszer esetében, mikor a nyitott kör átviteli függvénye W0(s)=kexp(-sTh), a k=1 körerősítés értéknél a zárt rendszer a stabilitás határhelyzetében lenne.
[2] A H(s) most nem a Wp(s) átviteli függvény nevezőjét, hanem az exp(-sTh) transzcendens tényezőt jelenti.
[3] Az egyenértékű struktúra zárt hatáslánca transzcendens tényezőt nem tartalmaz, miután H(s) a zárt hatásláncon kívülre „helyezettnek” tekinthető.
[4] A vpT(kTs) a folyamat holtidő nélküli vpT(t) átmeneti függvénye alapján képzett mintasorozat.














