



Szabályozástechnika 54
Hibrid szabályozás rendszertechnikai méretezése – 4
A tervezés lépései a diszkrétidejű modell felhasználásával
A továbbiakban a folytonosidejű és a diszkrétidejű tervezési módszerek áttekintése után részletesen megvizsgáljuk a diszkrétidejű modell felhsználásával végrehajtott tervezés egyes lépéseit, amelyeket konkrét példákon keresztül szemléltetünk.
1. A Ts mintavételezési idő megválasztása
A folytonosidejű Wp(s) átviteli függvényű szakaszmodell paramétereinek (a Tpi időállandóinak és a Th holtidejének) ismerete alapján – a korábban közölt ajánlást figyelembe véve – megválasztjuk az alkalmazni kívánt Ts mintavételezési időt. Lehetséges, hogy az erre épített méretezési eljárás a zárt rendszer olyan működésmódjához vezet, amely Ts esetleges módosítását igényli. Ha ez előfordul, a módosított mintavételezési idővel a méretezést meg kell ismételni. Ha a folyamatnak Th holtideje is van, célszerű, ha Th a választott mintavételezési idő egész számú többszöröse (Th=lTs, és l egész), mert ez a folyamat Wp(z) impulzusátviteli függvényének meghatározását egyszerűsíti.
2. A folyamat Wp(z) diszkrét modelljének meghatározása
Az adott Wp(s) folytonosidejű szakaszmodell és az ajánlás alapján felvett Ts mintavételezési idő ismeretében meghatározzuk a zérusrendű tartószerv átviteli függvényével bővített FI-folyamat Wp(z) impulzusátviteli függvényét és az ennek megfelelő pólus–zérus alakot (Th=lTs).

Ennek jellegzetes tulajdonsága, hogy a diszkrét zpi pólusok a folytonos folyamat Tpi időállandóiból származnak, értékeik rendre zpi=exp(-Ts/Tpi). Ebből következik, hogy Tp1>Tp2>¼>Tpm>0 esetén 1>zp1>zp2>¼>zpm>0, vagyis a nagyobb időállandókhoz tartozó zpi pólusok az egységhez közelebb álló számértékek, és a z sík valós tengelyének a 1>zpi>0 szakaszán helyezkednek el. Ha a folyamat Th holtideje a Ts mintavételezési idő egész számú többszöröse (Th=lTs), akkor Wp(z) – a Wp(s) transzcendens tényezőjének ellenére – a z operátornak továbbra is algebrai törtje marad, és további l számú pólusa van a z komplex sík origójában is. Wp(z) „kézi módszerrel” történő számítása – Wp(s) magasabb fokszáma és a zérusok nem kölcsönös megfeleltetése miatt – igen körülményes, így a MATLAB igénybevétele itt fokozottan indokolt. A Wp(z) számítása MATLAB-támogatással [1]:
% Wp(s)=Gp(s)/Hp(s) adatainak bevitele:
Gps=input('Gps=');Hps=input('Hps=');
% A Ts mintavételezési idő bevitele:
Ts=input('Ts=');
% Wp(z)=Gp(z)/Hp(z) kiszámítása:
[Gpz,Hpz]=c2dm(Gps,Hps,Ts,'zoh');
% Wp(z) pólus–zérus alakja:
[zz,zp,kpd)=tf2zp(Gpz,Hpz);
% Wp(z) pólusainak kiíratása:
disp(zp);
Ezzel – ha az adatbekéréseknek (lásd input-utasítások) eleget tettünk – meghatároztuk a szakasz Wp(z) impulzusátviteli függvényét (c2dm), valamint ennek zzi zérusait és zpi pólusait (tf2zp). A kompenzációs szabályozó tervezésekor a Wp(z) impulzusátviteli függvény zpi pólusainak van meghatározó szerepe [2].
3. Diszkrét Wc(z) szabályozási algoritmus megválasztása
A méretezés követelményei alapján választunk egy Wc(z) impulzusátviteli függvénnyel leírt diszkrét szabályozót. Ez igen gyakran egy „ideális” [3] PD-fokozatot tartalmazó, diszkrétidejű PIPD-szabályozó, amelynek impulzusátviteli függvénye:
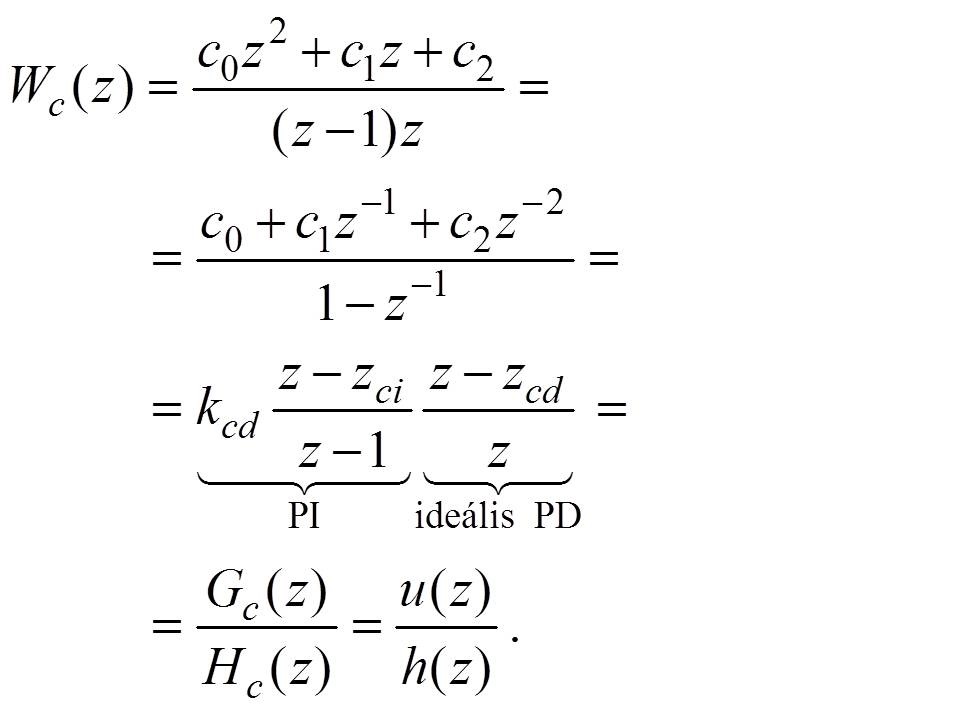
A szabályozási algoritmus differenciaegyenlete a Wc(z) impulzusátviteli függvény z-1 változóra rendezett alakjából közvetlenül felírható. A DI-szabályozó az aktuális u(kTs) irányítójelet ennek megelőző
z-1u(z) → u[(k-1)Ts]
értékéből, valamint a hibajel h(z) → h(kTs) aktuális és két megelőző
z-1h(z) → h[(k-1)Ts], z-2h(z) → h[(k-2)Ts]
értékeiből az alábbi algoritmus szerint állítja elő:
u(kTs)=u[(k-1)Ts]+ c0h(kTs)+ c1h[(k-1)Ts]+ c2h[(k-2)Ts]=
u[(k-1)Ts]+kcd{h(kTs)-(zci+zcd)h[(k-1)Ts]+zcizcdh[(k-2)Ts]}.
A kompenzációra most is a póluskiejtés módszerét alkalmazva, Wc(z) zci és zcd zérusai kell hogy kiejtsék a szakasz diszkrét modelljének (a Wp(s) folytonosidejű modelljének két legnagyobb Tp1>0,Tp2>0 időállandójából származó) zp1=exp(-Ts/Tp1)=zci és zp2=exp(-Ts/Tp2)=zcd diszkrét pólusait. Ezen túlmenően – a diszkrét szabályozó impulzusátviteli függvényének Hc(z) nevezőjében megjelenő (z-1) tényezőjéből kiolvashatóan – a nyitott körbe egy integráló hatás is beiktatódik. Ez a tényező a hibrid szabályozás DI-modelljének i típusszámát befolyásolja, és ha a W0(z) nevezőjének egyetlen zp=1 értékű gyöke van, a szabályozás i=1 típusú integrálszabályozás [4]. A szabályozó méretezésének feladata – a felvett PIPD-típusú diszkrét szabályozó választásának következményeként – ilyen módon a kcd=c0 paraméter meghatározására egyszerűsödik.
Megjegyzés
A szabályozási algoritmus megválasztásakor természetesen más DDC-szabályozási algoritmusok (P, I, PI, PD, PDi stb.) is szóba jöhetnek [5], és a póluskiejtés mellett a pólusáthelyezés is alkalmazható. A folytonosidejű szabályozók diszkrétidejű megfelelőinek impulzusátviteli függvényeit az 1. táblázatban adtuk meg.
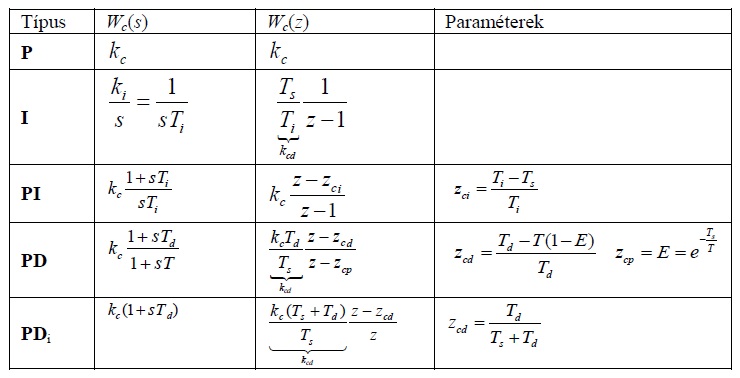
1. táblázat Szabályozó alaptípusok
4. A diszkrétidejű szabályozó kcd átviteli tényezőjének meghatározása
A diszkrétidejű modell felnyitott körének W0(z)=Wc(z)Wp(z) impulzusátviteli függvénye:
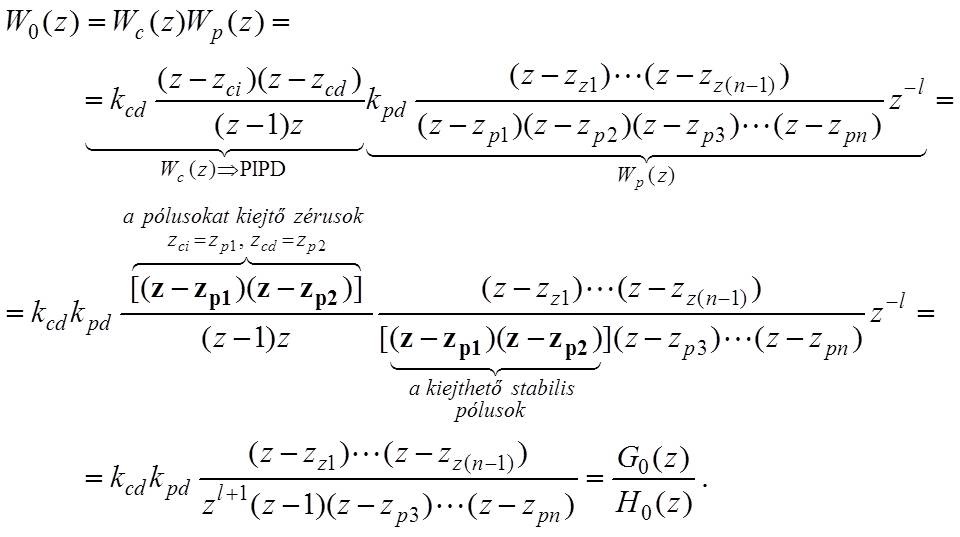
Figyeljük meg, hogy a zci=zp1=exp(-Ts/Tp1) és a zcd=zp2=exp(-Ts/Tp2) választásával a folyamat két legnagyobb időállandójából származó stabilis 0<zp1<1 és 0<zp2<1 diszkrét pólusait a nyitott kör W0(z) impulzusátviteli függvényéből mintegy „kiejthetjük” [6], mely után a W0(z)-ben csupán egyetlen ismeretlen paraméter – a szabályozó kcd átviteli tényezője – marad. Ennek értékét úgy kell beállítani, hogy a DI-nyitott kör W0d frekvenciafüggvényének ωc vágási körfrekvenciáján a φt(ωc) fázistöbblete egy előírt érték legyen, mivel ez szabja meg a zárt DI-szabályozási rendszer stabilitását és eredő átmeneti függvényének a túllendülését. A szabályozásokat általában φt(ωc)=π/3 (60°) fázistöbbletre szokás méretezni, mivel ekkor a zárt rendszer vR(t) átmeneti függvényének σ(%) túllendülése 10% alatti értékre várható. A fázistöbblet előírásának teljesítéséhez tehát az ωc vágási körfrekvencián az alábbi feltételek betartása szükséges:

Ennek a kétismeretlenes (ωc, kcd), két egyenletből álló nemlineáris algebrai egyenletrendszernek a megoldása szolgáltatja a W0d diszkrét frekvenciafüggvénynek ωc vágási körfrekvenciáját és az ehhez tartozó kcd átviteli (erősítési) tényezőt. A MATLAB fsolve-eljárása ugyan támogatja a nemlineáris egyenletrendszernek a megoldását, de alkalmazásához ωc és kcd keresésének indítási értékeit meg kell adni. Ennek becslése, valamint a hamis gyökök elvetése az eljárást nehézkessé teszi, ezért a megoldás megkeresésének egy szemléletesebb, egyszerűbb módszerével dolgozunk [7]. Ez a módszer a nyitott kör
![]()
fázismenetének azon a tulajdonságán alapszik, hogy ez nem függ a szabályozó a kcd erősítési tényezőjétől. Ezért először a φ0d(ω) fázismenetet tartalmazó egyenletből meghatározzuk azt az ωc vágási körfrekvenciát, amelynél a DI-nyitott kör fázistöbblete az előírt
φt(ωc)=π+φ0d(ωc)
érték (pl. φ0d(ωc)=-1200 esetében φt(ωc)=600), majd ennek ismeretében az a0d(ωc)=1 feltétel alapján kiszámítjuk a kcd azon értéket, amely az a0d(ωc)=1 amplitúdófeltételnek is eleget tesz. A kcd1=1 önkényes (de mint később látjuk, célszerűen választott) felvételével és a dbode-utasítás felhasználásával – ha egyébként 600 fázistöbbletre kívánjuk a tervezést végrehajtani – megkeressük azt a φ0d(ω)=arcW0d fázismenethez tartozó ω1 értéket, amikor is ez a szög φ0d(ω1)=-120°. Ha ezt a ω1 értékét választjuk a nyitott kör ωc vágási körfrekvenciájának (ωc=ω1), akkor a DI-nyitott kör φt(ωc)=π/3 (60°) fázistöbblettel fog rendelkezni. A módszert – a nyitott hurok W0d frekvenciafüggvényének (Nyquist- és Bode-diagramjainak) ábrázolásával – az 1. ábra szemlélteti [8].

1. ábra A diszkrét nyitott kör frekvenciafüggvényének Nyquist- és Bode-diagramjai
Az ωc körfrekvencián adódó a0d1(ωc)=absW0d amplitúdóérték az önkényesen felvett kcd1=1 erősítés mellett érvényes, és az amplitúdófeltétel kielégítéséhez azonosan egységnek kellene lennie. Miután általában nem az, de kcd az amplitúdómenetet kcdabsW0d szerint módosítja, emiatt a kcd tényezővel a kcda0d1(ωc)=1 beállítható. Az amplitúdófeltétel betartásához tehát a szabályozó kcd erősítését a
![]()
értékre kell választani. A vázolt eljárás részletszámításait – az amplitúdó- és fázismenet transzcendens volta miatt – számítógépes módszerekkel célszerű elvégezni. MATLAB-támogatás igénybevételével:
%Wc(z) zci és zcd zérusainak felvétele:
i=zp(1);zcd=zp(2);
%Wc(z) számlálója kcd1=1 mellett:
Gcz=conv([1 -zci],[1 -zcd]);
%Wc(z) nevezője:
Hcz=[1 -1 0];
%W0(z)=Wc(z)Wp(z) számítása kcd1=1 mellett:
[Goz,Hoz]=series(Gcz,Hcz,Gpz,Hpz);
%W0(z) Bode diagramjának megjelenítése:
dbode(Goz,Hoz,Ts)
A dbode(Goz,Hoz,Ts); utasítás hatására a képernyőn megjelenített a0d(ω) és φ0d(ω) diagramok a kcd1=1 értékre érvényesek és a φ0d(ω) fázismenetre vonatkozó tájékozódás célját szolgálják (1.b. ábra). A kcd1 értékétől független fázismenet ábrája alapján itt választjuk ki azt a körfrekvencia-tartományt, amelyben a φ0d(ω) fázisszög -1200 értéke (ha a fázistöbbletre vonatkozó előírás egyébként φt(ωc)=600) biztosan benne van. Ha például ez a 1<ω<10 intervallum, akkor ebben az a0d(ω) és φ0d(ω) értékeket számszerűen is meghatározzuk, és a képernyőre kiíratjuk. Részletezve:
[a0d,f0d,w]=dbode(Goz,Hoz,Ts,1:1:10);
disp([a0d f0d w']);
Az eredményül kapott három oszlopból és tíz sorból álló táblázat φ0d(ω) értékeit tartalmazó középső oszlopából (f0d=φ0d) megkeressük a -120°-os fázisszöget magában foglaló szűkített körfrekvencia-intervallumot, és az előző két utasítás visszahívásával az a0d és φ0d értékeit ebben a szűkített intervallumban újra számoljuk. Néhány iterációs lépés után a -120° értéket magában foglaló tartomány tetszőlegesen kis körfrekvencia-intervallumra szűkíthető. Például:
[a0d,f0d,w]=dbode(Goz,Hoz,Ts,4.99:0.001:5.00);
disp([a0d f0d w']);
1.709 -119.995 4.991
1.708 -119.996 4.992
1.707 -119.997 4.993
1.706 -119.998 4.994
1.705 -119.999 4.995
1.704 -120.000 4.996
1.703 -120.001 4.997
1.702 -120.002 4.998
1.701 -120.003 4.999
1.700 -120.004 5.000
Ezt a pontosságot [9] elfogadva a φ0d =-1200 fázisszöghöz az ω1=4,996 értéke, és az absW0d amplitúdónak a0d1(ω1)=1,704 értéke olvasható le. A vágási körfrekvenciának az ωc=4,996=ω1 értéket választva a0d1(ωc) 1,7040 értékre adódik. A szabályozó kcd erősítését tehát úgy kell beállítani, hogy kcda0d1(ωc)=1 legyen, ezért kcd=1/a0d1(ωc)=1/1,7040. A méretezett szabályozó ezzel:
a0d1=1.7040;
kcd=1/a0d1;
Gcz=kcd*Gcz;
printsys(Gcz,Hcz,'z');
A printsys-utasítás a képernyőre a méretezett szabályozó impulzusátviteli függvényét Wc(z)=Gc(z)/Hc(z) algebrai tört alakjában jeleníti meg. Ezzel a méretezést elvégeztük, mivel a szabályozó impulzusátviteli függvénye a szabályozási algoritmust (a diszkrét irányítójel és a diszkrét hibajel közötti kapcsolatot leíró differenciaegyenletet) egyértelműen és számszerűen meghatározza.
5. A méretezés ellenőrzése [10]
Wc(z) és Wp(z) ismeretében – az előzőekben kapott eredmények ellenőrzésére – kiszámítjuk a diszkrétidejű modell nyitott körének tényleges ωc vágási körfrekvenciáját és φt(ωc) fázistartalékát, valamint a zárt rendszer egységminta-sorozat szerint változó diszkrét alapjelugrásra vonatkozó u(kTs) és y(kTs) diszkrét válaszait:
% W0(z)=Wc(z)Wp(z) számítása:
[Goz,Hoz]=series(Gcz,Hcz,Gpz,Hpz);
% a0d(w),f0d(w),w számítása:
[a0d,f0d,w]=dbode(Goz,Hoz,Ts);
[adt,fdt,wt,wc]=margin(a0d,f0d,w);
disp([wc fdt]);
4.995 60
Itt a korábban választott vágási körfrekvencia értékét és a 60° fázistöbbletet kell megkapnunk. Számítsuk a zárt rendszer u(kTs) és y(kTs) válaszait az egységmintasorozat alapjelre:
% WR(z)=W0(z)/[1+W0(z)]=y(z)/ua(z):
[GRyz,HRyz]=cloop(Goz,Hoz);
% Wc(z)/[1+W0(z)]=u(z)/ua(z):
[GRuz,HRuz]=feedback(Gcz,Hcz,Gpz,Hpz);
% Az y(kTs) mintasorozat:
dstep(GRyz,HRyz);
% Az u(kTs) mintasorozat:
dstep(GRuz,HRuz);
Megjegyzés
A MATLAB dstep utasítása az u(kTs) és y(kTs) diszkrét jeleket úgy ábrázolja, mintha ezek egy zoh-tartószerven haladnának át (lépcsős görbék). Az u(kTs) esetében ezért ez a hibrid rendszer zoh-val tartott uT(t) irányítójelét jelenti, az y(kTs) esetében a valóságban folytonosidejű y(t) szabályozott jellemző időfüggvényének egy olyan lépcsős közelítését adja, amely kizárólag a mintavételezési időpontokban azonos az y(t) kimenőjellel. Ha az y(kTs) jelen kívül a hibrid rendszer modelljének tényleges y(t) jelét is meg kívánjuk határozni (vagyis azt, hogy a mintavételezési időpontok között milyen a szabályozott jellemző időfüggvénye), ennek egyik módszere lehet, hogy a diszkrét modell alapján kiszámított folytonos, lépcsős uT(t) jelet működtetjük a Wp(s) folytonos átviteli függvényű folyamat bemenetén, és az lsim-utasítást használjuk a folytonos y(t) meghatározására. A számítás hatásvázlaton való szemléltetését a 2. ábra mutatja. Ha a Ts mintavételezési idő lényegesen kisebb a zárt rendszer domináns időállandóinál, akkor az y szabályozott jellemző lépcsős közelítése is kielégítő eredményt szolgáltat a tényleges y(t) időfüggvényről.
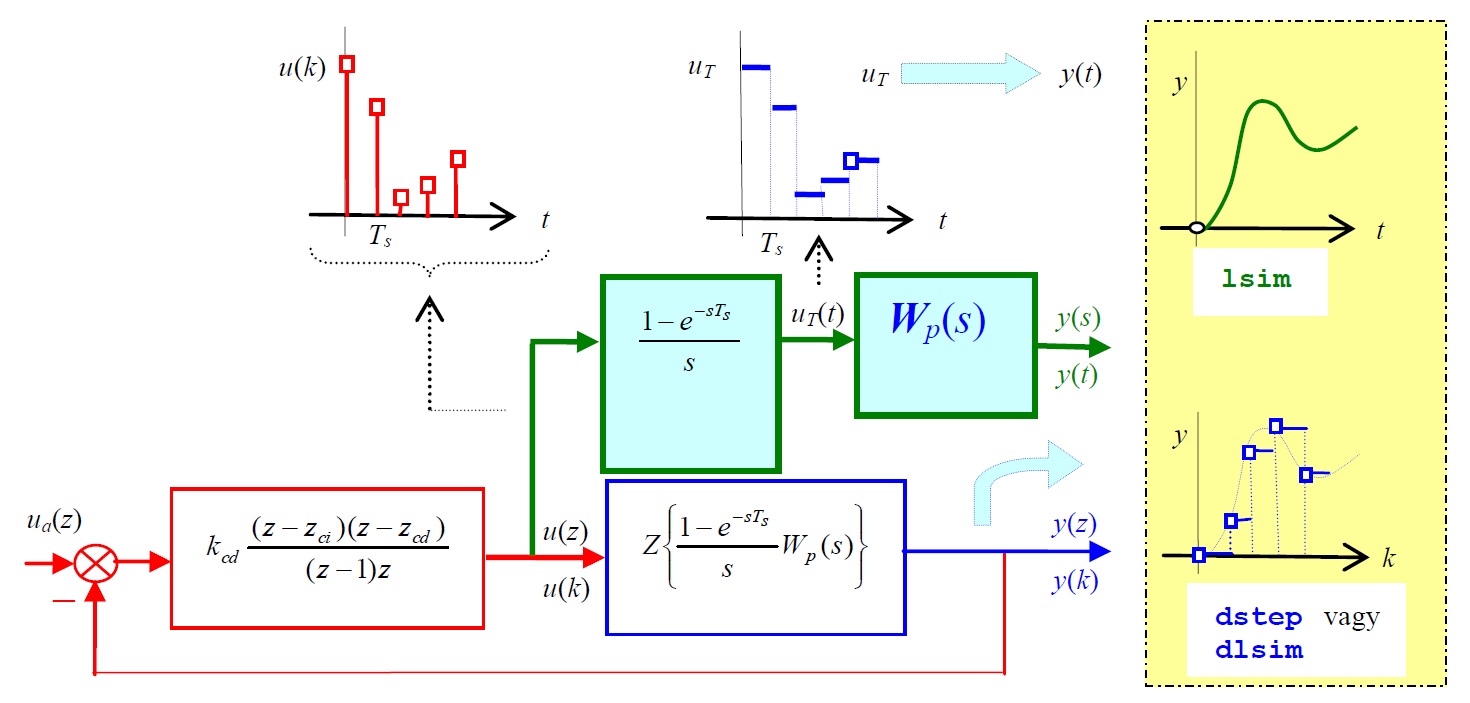
2. ábra A hibrid rendszer folytonosidejű y(t) kimenőjelének meghatározása
Példa
Két energiatárolós, holtidős FI-folyamat Wp(s) átviteli függvénye a holtidős tag negyedfokú Strejc-közelítésével [11] és relatív (dimenziótlan) egységekben:

A folyamat átviteli függvényének paraméterei: kp=1; Tp1=20; Tp2=10; Th=4.
A hibrid szabályozási rendszer diszkrét modellje alapján tervezzünk olyan

impulzusátviteli függvénnyel leírt, „ideális” PD-fokozatot tartalmazó PIPD-szabályozási algoritmust, amelynek zci és zcd zérusai kompenzálják a folyamat diszkrét modelljének a Tp1 és Tp2 időállandókból származó zp1=exp(-Ts/Tp1) és zp2=exp(-Ts/Tp2) pólusait, valamint a nyitott kör diszkrét frekvenciafüggvényének φt(ωc)=π/3 (60°) fázistöbbletet biztosít.
Megoldás
1. A Ts mintavételezési idő megválasztása

Legyen Ts=2. Ekkor a Th=2Ts feltétel is betartható (1=2, vagyis a Th holtidő a Ts mintavételezési idő kétszerese).
2. A folyamat Wp(z) impulzusátviteli függvényének számítása
Wp(s) és Ts ismeretében kiszámítjuk a zérusrendű tartószervvel kiegészített folyamat Wp(z)=Gp(z)/Hp(z) impulzusátviteli függvényét. A számítást a szakasz holtidős tényezőjének negyedfokú Strejc-közelítése alapján, MATLAB-támogatással végezzük:
kp=1;Tp1=20;Tp2=10;Th=4;Ts=2;
Gps=kp;
Hhs=conv([(Th/4)^2 Th/2 1],[(Th/4)^2 Th/2 1]);
Hps=conv(conv([Tp1 1],[Tp2 1]),Hhs);
[Gpz,Hpz]=c2dm(Gps,Hps,Ts);
[zz,zp,kpd]=tf2zp(Gpz,Hpz);
disp(zp);
0.9048 → exp(–Ts/Tp1)= exp(–2/20)
0.8187 → exp(–Ts/Tp2)= exp(–2/10)
0.1353 → exp(–Ts/(Th/4))=exp(–2/1)
0.1353
0.1353
0.1353
A Tp1=20 és Tp2=10 időállandókból származó diszkrét pólusok zp1=0,9048, zp2=0,8187. Ezeket a pólusokat kell (és lehet!) a diszkrét PIPD-szabályozó zci és zcd zérusainak – a póluskiejtés módszerével – kompenzálnia. Ez azért lehetséges, mert a folyamat DI-modelljének minden pólusa – miután az FI-folyamat aszimptotikusan stabilis – a z komplex számsík stabilis tartományában (az egységsugarú kör belsejében) van.
Megjegyzés
A folyamat Wp(z) diszkrét modelljét – miután a felvett Ts=2 mintavételezési időnél a Th=4 holtidő ennek kétszerese (Th=2Ts , l=2) – a Strejc-közelítés nélkül is számíthatjuk. Eszerint:
Gps=kp;Hps1=conv([Tp1 1],[Tp2 1]);
[Gpz,Hpz1]=c2dm(Gps,Hps1,Ts);
[zz,zp,kpd]=tf2zp(Gpz,Hpz);
disp(zp);
0
0
0.9048
0.8187
Az így előálló Wp(z) diszkrét szakaszmodell ugyan most a holtidőt pontosan veszi figyelembe, és egyszerűbb (alacsonyabb fokszámú), mint ami a Strejc-közelítés alapján kapható, ennek ellenére célszerűbb a közelítés alapján dolgoznunk. Ennek magyarázata, hogy általában nem garantálható, hogy a Th holtidő a Ts mintavételezési időnek egész számú többszöröse legyen, vagy Th<
3. A szabályozási algoritmus megválasztása
A diszkrétidejű szabályozási algoritmust a digitális számítógépen futó PIPD-elvre épített real time program realizálja. Ezt a programot a szabályozó Wc(z) impulzusátviteli függvénye reprezentálja, amelynek zci, zcd zérusait úgy kell megválasztani, hogy a folyamat Tp1 és Tp2 időállandóikból származó zp1, zp2 pólusait, a diszkrét szabályozó zci és zcd zérusai – a zérus–pólus kiejtés módszerével – kompenzálják [12]. Ezért zci=zp1=0,9048 és zcd=zp2=0,8187.
4. A szabályozó kcd erősítési tényezőjének méretezése
A szakasz diszkrét pólusainak ismeretében tehát megállapítható, hogy a szabályozó zérusainak mely pólusokat kell kiejtenie (azt a kettőt, amelyek a legjobban megközelítik az egységet, mert ezek származnak a folyamat legnagyobb időállandóiból). A szabályozó erősítési tényezőjét kcd1=1 értékre előzetesen (és önkényesen) felvéve számítható a nyitott kör W0(z)=G0(z)/H0(z) impulzusátviteli függvénye és az ennek megfelelő a0d(ω) amplitúdó- és φ0d(ω) fázismenet (3. ábra). A φ0d(ω) fázismenetre a szabályozó kcd erősítésének semmi befolyása nincs.
%kcd1=1;
zci=zp(1);zcd=zp(2);
Gcz=conv([1 -zci],[1 -zcd]);
Hcz=[1 -1 0];
[Goz,Hoz]=series(Gcz,Hcz,Gpz,Hpz);
dbode(Goz,Hoz,Ts);

3. ábra A W0d frekvenciafüggvény dbode(Goz,Hoz,Ts); MATLAB-utasítás hatására megjelenített Bode-diagramjai
A képernyőn megjelenített diagram tájékoztató jellegű, és a fázismenetre vonatkozó része a meghatározó. A fázismenetből leolvasható hogy a -120° fázisszög (ekkor a fázistöbblet jt=60°) a körfrekvencia-intervallumnak egy körülbelül 0,01<w<0,1 szakaszára esik. Számítsuk ki ebben a tartományban az amplitúdómenet és a fázismenet pontos számértékeit. Néhány finomító lépés után a -120° értéket magában foglaló frekvenciatartomány kellő pontossággal behatárolható:
[a0d,f0d,w]=dbode(Goz,Hoz,Ts,0.088:0.0001:0.089);
disp([a0d f0d w']);
0.0963 -119.9482 0.0880
0.0961 -119.9821 0.0881
0.0960 -120.0161 0.0882
0.0959 -120.0500 0.0883
0.0958 -120.0839 0.0884
0.0957 -120.1178 0.0885
0.0956 -120.1517 0.0886
0.0955 -120.1856 0.0887
0.0954 -120.2195 0.0888
0.0953 -120.2534 0.0889
0.0951 -120.2874 0.0890
Ha a nyitott kör vágási körfrekvenciáját ω1=ωc=0,0882 értékre választjuk, akkor φ0d(ωc) @ -120.01610 és a DI-nyitott kör fázistöbblete φt(ωc)@60°. Ehhez azonban az is szükséges, hogy ezen a körfrekvencián absW0d=a0d(ωc)=1 legyen. Az előző táblázat adatai kcd1=1 értékre vonatkoznak, és mint láttuk, kcd értéke a fázismenetet nem befolyásolja. Ezért egy új kcd választással az absW0d=kcda0d1(ωc)=1 beállítható. Ebből kcd=1/a0d1(ωc), ahol a0d1(ωc ) az előző táblázat eredményei alapján a0d1(ωc ) = 0,0960.
a0d1=0.096;kcd=1/a0d1;
Gcz=kcd*Gcz;
printsys(Gcz,Hcz,'z');
num/den=
10.42z^2-17.95z+7.717
---------------------
z^2 – z
A kapott eredmény – az adott feltételrendszer követelményei szerint méretezett – diszkrét működésű PIPD-szabályozó impulzusátviteli függvénye. A h(k)=ua(k)-y(k) hibajelből képzett u(k) irányítójel előállítása ennek alapján az alábbi rekurzív differenciaegyenlet alapján történik:
u(k)=u(k-1)+10,42h(k)-17,95h(k-1)+7,717h(k-2) Ts=2.
Ez az algoritmus a h(k)={1, 1, 1, ..., 1, ...} egységminta-sorozat hibajelre u(k)={10,4200, 2,8900, 3,0770, 3,2640, 3,4510, 3,6380, 3,8250, 4,0120, 4,1990,…} válaszminta-sorozatot ad, ami egyébként a diszkrétidejű PIPD-szabályozó v0(k) átmeneti mintasorozata.
5. A méretezés ellenőrzése
A szakasz és a szabályozó impulzusátviteli függvényeinek ismeretében meghatározható a DI-nyitott kör W0(z) impulzusátviteli függvénye és z=exp(jωTs) helyettesítéssel az ennek megfelelő W0d[exp(jωTs)] nyitott köri diszkrét frekvenciafüggvény. Ennek a0d(ω) amplitúdó- és φ0d(ω) fázismenete a dbode MATLAB-függvénnyel számítható. Ezek ismeretében a W0d diszkrét frekvenciafüggvény ωc vágási körfrekvenciája és φt(ωc) fázistartaléka is meghatározható.
%W0(z) számítása:
[Goz,Hoz]=series(Gcz,Hcz,Gpz,Hpz);
[a0d,f0d,w]=dbode(Goz,Hoz,Ts);
[at,ft,wt,wc]=margin(a0d,f0d,w);
disp([wc ft]);
0.0882 59.9588
nyitott kör W0d frekvenciafüggvényének ωc=0,0882 vágási körfrekvenciánál ~60° fázistöbblete van. Ez egyben azt is jelenti, hogy a zárt rendszer átmeneti függvényének túllendülése a 10%-ot nem haladja meg, szabályozási ideje pedig p/ωc
% WR(z)=W0(z)/((1+W0(z))=y(z)/ua(z)
[GRyz,HRyz]=cloop(Goz,Hoz);
% Wc(z)/((1+Wc(z))=u(z)/ua(z)
[GRuz,HRuz]=feedback(Gcz,Hcz,Gpz,Hpz);
dstep(GRyz,HRyz,25) % y(k)
dstep(GRuz,HRuz,25) % u(k)
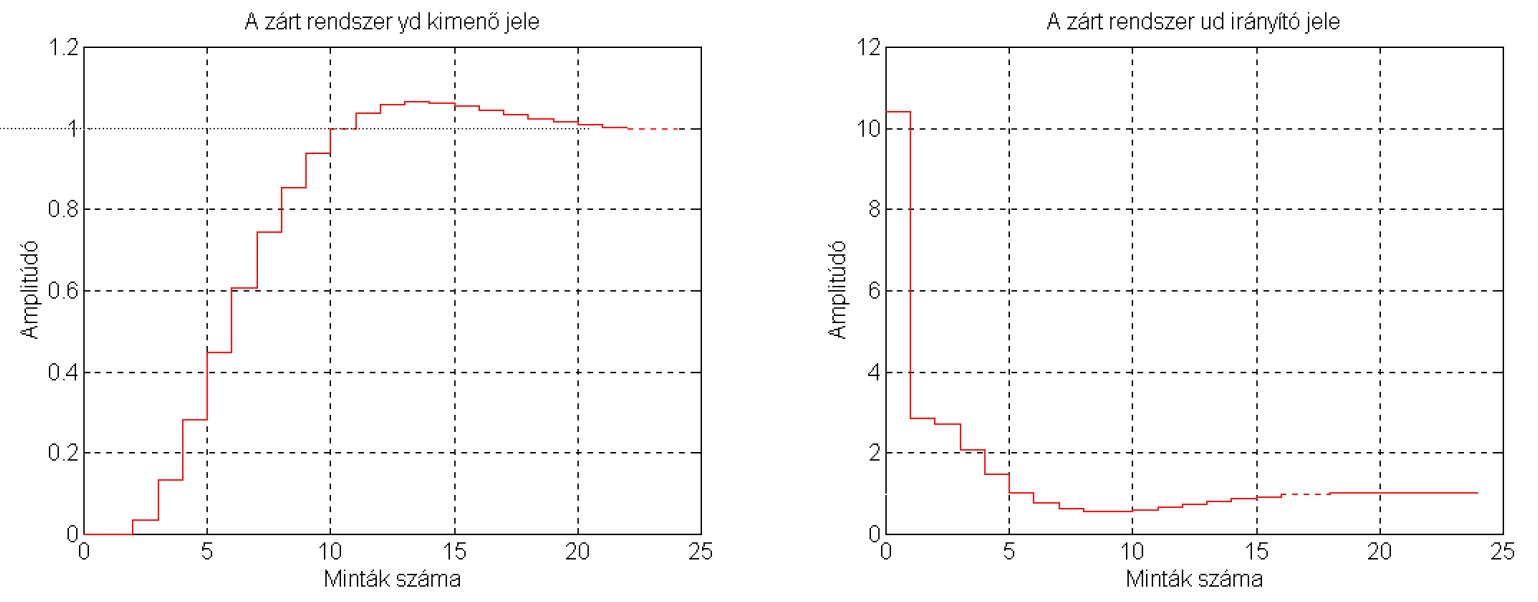
4. ábra A hibrid szabályozás DI-modellje alapján méretezett rendszer u(k)
és y(k) jelei
A kapott eredmények azt szemléltetik, hogy a zárt rendszer elfogadható túllendüléssel rendelkezik, és ut=u(0)/u(∞)=10,42 túlvezérlési arány mellett kb. ts=20Ts=40 szabályozási ideje van.
Folytatjuk!
Szerzők: Dr. Szilágyi Béla – Dr. Juhász Ferencné
[1] A közölt számítás során most feltételeztük, hogy az FI-folyamat Wp(s) átviteli függvényének exp(-sTh) transzcendens tényezőjét
exp(-sTh) ≈1/(1+sTh/m1)m1
Strejc-polinommal közelítettük (m1: 5…10).
[2] Az FI-folyamat Th>0 holtidejének egy másfajta figyelembevételét a soron következő számpéldában tárgyaljuk.
[3] Az „ideális” PDi-fokozat jelentése most az, hogy az irányítójel forszírozását kiváltó D-hatás egyetlen mintavételnyi ideig tart. Egy más megfogalmazásban: az „ideális” PDi-diszkrét algoritmus zcd zérusával – zcd=zp választásakor – a folyamat zp pólusát mintegy a z-sík origójába lehet áthelyezni.
[4] Az integrálszabályozás alkalmazásának előnyös tulajdonságait az alapfogalmak, illetve a folytonosidejű rendszerek tárgyalásakor már részleteztük. A W0(z) nevezőjében lévő (z-1) tényezők származhatnak a szabályozóba szándékoltan alkalmazott integráló hatás beiktatásából, de az is előfordulhat, hogy a folyamat Wp(z) impulzusátviteli függvényének nevezője maga is tartalmazza ezt a tulajdonságot (integráló tulajdonságú folyamatok). Az integráló fokozatok számának növelése ugyan egyre jobb statikus követést és értéktartást eredményez, de egyre nagyobb nehézségekkel jár a zárt rendszer stabilitásának biztosítása.
[5] A folytonosidejű, Wc(s)=kc(1+sTd) átviteli függvényű PDi-szabályozó (az ideális sTd átviteli függvényű D-fokozata miatt) nem realizálható. Ennek
kcd(1-zcdz-1) impulzusátviteli függvényű diszkrét megfelelője viszont realizálható, miután differenciaegyenlete: u(k)=kcd[h(k)-zcdh(k-1)].
[6] A folyamat pólusainak a szabályozó zérusaival történő „kiejtése” természetesen csak a matematikai modell tulajdonsága. A zpi=exp(-Ts/Tpi) pólusokat ugyanis az FI-folyamat Tpi időállandói határozzák meg, és ezek általában munkapontfüggő értékek. Mindezek miatt a fizikai valóságban az egzakt zérus–pólus „kiejtés” (a szabályozó egzakt zci és zcd zérusainak ellenére) nem valósulhat meg. A stabilis tartományban lévő pólusok esetében ez nem jelent problémát, labilis pólusokat azonban ilyen módszerrel „eltüntetni” nem szabad (lásd labilis folyamatok szabályozása)!
[7] Az eljárás (amely egyébként az FI-rendszer méretezésekor is felhasználható) kidolgozója Dr. Tuschák Róbert. Irodalom: Dr. Tuschák Róbert: Szabályozástechnika. Műegyetemi Kiadó.
[8] A DI-nyitott kör frekvenciafüggvényének Nyquist- és Bode-diagramjai hasonlítanak az FI-rendszer hasonló diagramjaihoz, de a DI-esetben az ωTs változó transzcendens függvényeiről van szó (lásd W0d kifejezését).
[9] A táblázatban szereplő számok nem egy, a paramétereinek tényleges számértékeivel definiált rendszer adatai, de az a0d amplitúdómenet, a φ0d fázismenet és az ω körfrekvencia alakulásának tendenciáit jól szemléltetik. (Az input adatbekérésnél ugyanis számszerűen nem definiáltuk a folyamatot és a mintavételezési időt).
[10] Ha a hibrid rendszert a folytonosidejű modellje alapján méreteztük, a méretezést követő ellenőrzés eljárása célszerűen az itt alkalmazott módszer lehet.
[11] A közelítés eredménye, hogy az eredetileg transzcendens tényezőt tartalmazó Wp(s) átviteli függvény polinomok hányadosaként jelenik meg, vagyis nem tartalmazza az exp(-sTh) transzcendens tényezőt. Ennek akkor van jelentősége, ha a Th holtidő a Ts mintavételezési időnek nem egész számú többszöröse.
[12] Ez a pólus–zérus kiejtés a – pólusok nem egzakt volta miatt – nem lehet tökéletes, ezért csak akkor jöhet szóba, ha a kiejteni kívánt pólus és a zérus az egységsugarú körben (a stabilis tartományban) van.













