



Szabályozástechnika 52
Hibrid szabályozás rendszertechnikai méretezése – 2
A hibrid rendszer tervezése a folytonosidejű (FI) modell alapján
A hibrid szabályozásban jelenlévő mintavételezés és zérusrendű tartás azt eredményezi, hogy szabályozási hurokban közelítőleg egy Ts/2 járulékos holtidő jelenlétét kell feltételezni, ahol Ts a mintavételezési idő. Ez a folyamat a már esetlegesen meglévő Th holtidőt tovább növeli (vagy ha a folyamatnak eredetileg nem volt holtideje, a hibrid működés Th=Ts/2 holtidőt hoz a zárt szabályozási hurok hatásláncába).
Mindez a tulajdonság az 1. ábra alapján interpretálható. Legyen az u(kTs) jel az u(t)=sin(ωt) T periódusidejű harmonikus jelből vett mintasorozat. Ebből a mintasorozatból – ha T/Ts>>1 racionális érték – a zoh egy olyan „lépcsős” jel alakú, periodikus FI-jelet állít elő, amelynek alapharmonikusa közelítőleg az eredeti u(t) jelnek egy Ts/2 idővel késleltetett alakja. Ezek alapján a hurokban jelenlévő mintavételezés és zérusrendű tartás egy
exp(-sTs/2) átviteli függvényű holtidős tagnak a hatásláncba történő soros beiktatásával közelíthető (2. ábra).

1. ábra A mintavételezés és a zérusrendű tartás közelítése holtidős taggal
Mindezekre való tekintettel a hibrid rendszer közelítőleg egy olyan, kizárólag FI-jeleket és -tagokat tartalmazó hatásvázlattal jellemezhető, amelyben (a hibrid működésmód következményeként) a hatáslánc belsejében jelen van egy Ts/2 járulékos holtidő. A járulékos holtidő megjelenése egy kedvezőtlen hatás, amelyet a szabályozó rendszertechnikai méretezésekor – hacsak hatása nem elhanyagolható – figyelembe kell venni [1].
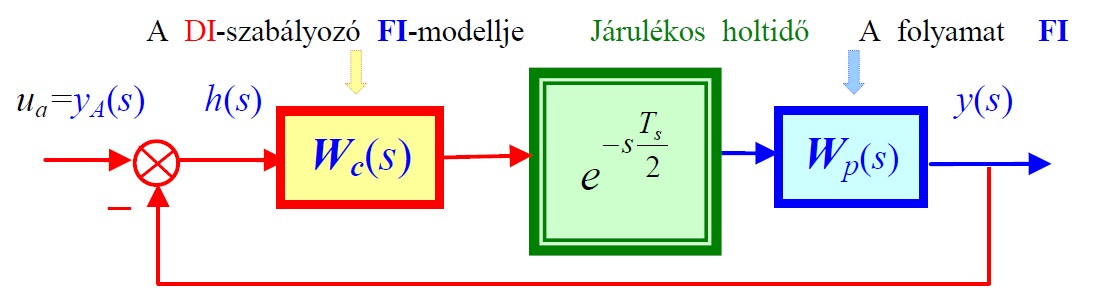
2. ábra Hibrid rendszer FI-jelekre homogenizált hatásvázlata
A holtidőnek ez a Ts/2 értékű növekedése (ha hatása nem elhanyagolható) kihat a szabályozás tranziens folyamataira, és a stabilitás esetleges elvesztését is okozhatja. Mindez akkor következhet be, ha Ts/2 járulékos holtidő a folytonosidejűnek feltételezett nyitott kör eredeti φt(ωc)>0 fázistöbbletét zérusra vagy negatív értékre rontja. A holtidő növekedésének ez a kedvezőtlen hatása a hibrid megoldás (a szabályozónak digitális számítógéppel történő kiváltása) ellen szól. Ez azonban csak látszólagos ellentmondás, ugyanis Ts megfelelő megválasztásával a járulékos holtidő hatása mérsékelhető (esetleg elhanyagolhatóvá tehető), és a hibrid működésmód előnyei érvényre juttathatók. Ezek az előnyök a DDC-szabályozó tulajdonságaiból (kedvező algoritmusválaszték, egyszerű paraméterállítási lehetőség, megbízható működés, a szabályozási algoritmus egzakt volta, a szabályozó adaptív alkalmazkodásának lehetősége a folyamat változó paramétereihez stb.) következnek, miután a szabályozási algoritmust egy digitális számítógép és az ezen futó real time program valósítja meg.
A szabályozási hurokban a Ts/2 járulékos holtidő miatt bekövetkező fázistöbblet romlása:
![]()
ahol ωc – a járulékos holtidő nélkülinek feltételezett FI-szabályozási rendszer – nyitott köri W0(jω) frekvenciafüggvényének vágási körfrekvenciája. Ez a Ts/2 holtidő azért járulékos, mert a folyamatnak is lehet egy saját Th holtideje. Ezért a nyitott kör eredő holtideje a mintavételezés és tartás miatt kb. Th+Ts/2 értékre növekszik meg. A nyitott körben az
exp(-sTs/2) átviteli függvényű tag a W0(jω) nyitott köri frekvenciafüggvény amplitúdómenetét nem befolyásolja, hatása kizárólag a fázismenetben,
(-ωTs/2 fázisszög romlást előidézve) jelenik meg (3. ábra). Ha a Δφt(ωc) fázistöbbletromlás megengedhető mértékű (pl. 1°…5°, és az FI-rendszert megfelelően nagy fázistöbbletre terveztük), akkor kedvezőtlen tulajdonsága a hibrid működésre átalakított szabályozási rendszer tranzienseiben alig észrevehető jelenséget eredményez.
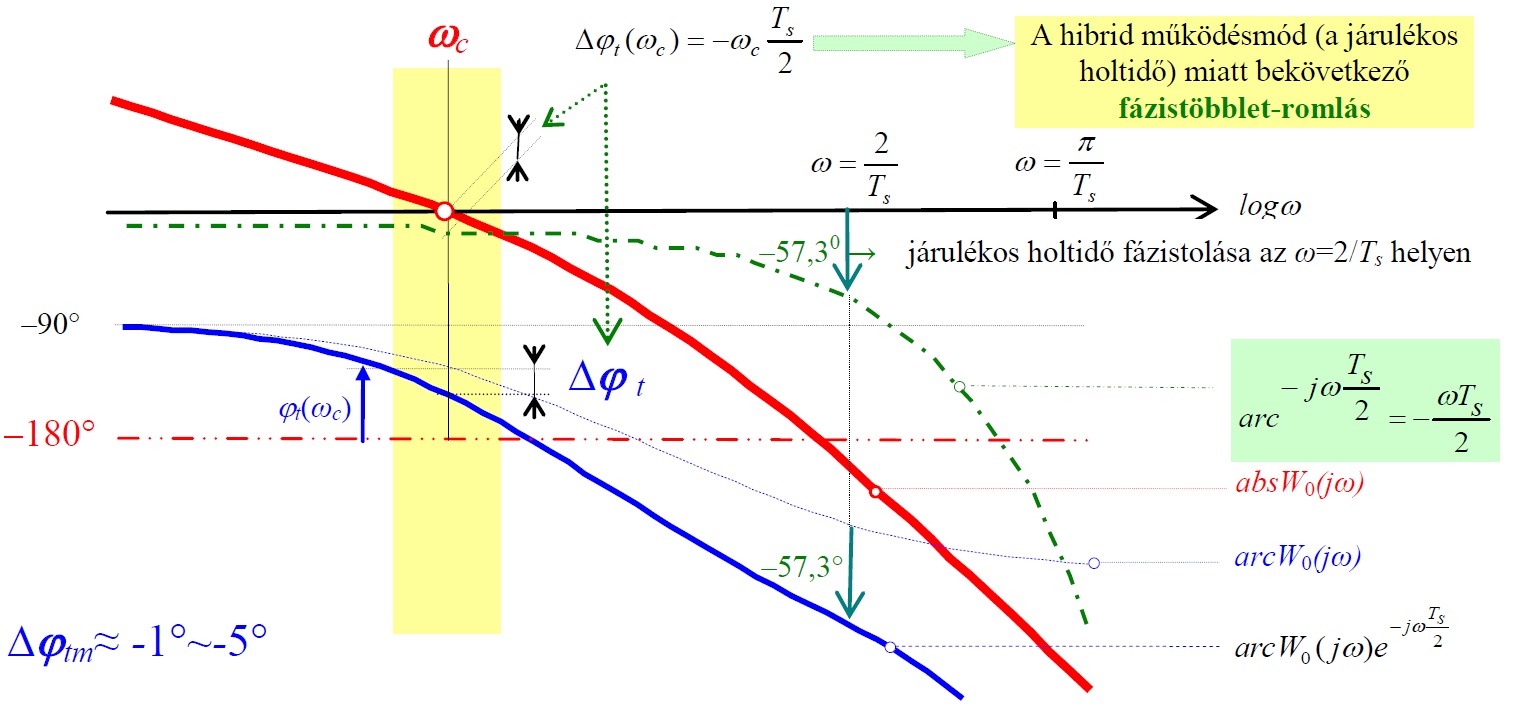
3. ábra A hibrid működésmód miatt bekövetkező fázistöbbletromlás szemléltetése
Az ωc helyen a Δφtm – szögfokban mért – fázistöbbletromlást megengedve választható meg a Ts mintavételezési idő:

Itt jegyezzük meg, hogy abban az esetben, ha a Ts mintavételezési időt az ωcTs/2=φt(ωc) feltétel alapján Ts=2φt(ωc)/ωc szerint választanánk meg, a hibrid üzemre alakított rendszer fázistöbblete kb. zérusra csökkenne, és a hibrid szabályozás a stabilitás határhelyzetén üzemelne. Ez nyilvánvalóan nem megengedhető üzemállapot. Az FI-modell alapján történő tervezés tehát visszavezethető egy korábban már tárgyalt analóg szabályozás tervezési eljárására, majd az így meghatározott Wc(s) átviteli függvényű szabályozó diszkretizálására.
A tervezés lépései a folytonosidejű modell alapján
1. Folytonos szabályozó tervezése
A folyamat ismert Wp(s) átviteli függvényéhez – egy adott jt(ωc) fázistöbblet (pl. 600), és ut túlvezérlési arány (pl. ut=u(0)/u(∞)=10) követelményeinek kielégítése alapján – tervezünk egy folytonos, Wc(s) átviteli függvényű, soros kompenzációs szabályozót (lásd az FI-szabályozás rendszertechnikai tervezése tárgyában már korábban ismertetett anyagrészeket és tervező MATLAB-programot).
2. A Ts mintavételezési idő megválasztása
Miután a Wc(s) méretezésének eredményeként a folytonosidejű szabályozási rendszer W0(jω)=Wc(jω)Wp(jω) nyitott köri frekvenciafüggvénye ismert, ezért az FI-szabályozás jt(wc) fázistöbblete és az wc vágási körfrekvenciája is adottnak tekinthető. Ezek birtokában – a fázistöbbletromlásra Δφtm(ωc) értéket megengedve – meghatározzuk a Ts mintavételezési időt (Ts=(πΔφtm)/(90ωc) ), ha a felvett Δφtm(ωc)<<jt(ωc) értékénél a hibrid működésmód miatti Ts/2 járulékos holtidő fázistöbbletet rontó hatása a zárt szabályozási rendszer tranzienseinek alakulásában nem lesz számottevően észrevehető.
3. A diszkrét szabályozási algoritmus meghatározása
Wc(s) és Ts ismeretében kiszámíthatjuk a korábban tervezett Wc(s) átviteli függvényű FI-szabályozó DI-megfelelőjének Wc(z) impulzusátviteli függvényét, amely egyben a szabályozási algoritmust is jelenti. A megfeleltetést azon az elven számítjuk, hogy a DI-szabályozó
vc(k)=Z-1{Wc(z)z/(z-1)}
átmeneti mintasorozata legyen azonos az FI-szabályozó vc(t)=L-1{Wc(s)/s} átmeneti függvényének alapján számítható mintasorozatával. Ha például a méretezett (tehát ismert Kc, TI, TD, T paraméterekkel rendelkező) folytonosidejű PID-szabályozó [2] átviteli függvénye

akkor ez a h(t)=1(t) hibajelre

választ ad. A szabályozó vc(t) átmeneti függvénye és az ennek alapján képzett u(kTs)=vc(kTs) mintasorozat az 5. ábrán látható. A folytonosidejű PID-szabályozó vc(t) átmeneti függvényéből származtatható u(kTs) mintasorozat Z-transzformáltja a szabályozó P-csatornájának 1(t) egységugrásából, az I-csatorna t1(t) sebességugrásából, valamint a DT-csatorna exp(-t/T)1(t) „lecsengő” exponenciális időfüggvényéből vett mintasorozatok Z-transzformáltjainak súlyozott összegéből rakható össze (lásd a Z-transzformáció linearitási tételét). Részletezve:

És mindezek figyelembevételével

Ennek a kifejezésnek megfelelő mintasorozat a diszkrét szabályozó kimenetén akkor jelenik meg, ha a h(kTs) hibajel mintasorozatának Z-transzformáltja az egységugrásból származik, vagyis h(z)=z/(z-1). A diszkrét szabályozó SRE-típusú Wc(z) impulzusátviteli függvényének különféle alakjai ezzel:

A szabályozási algoritmust meghatározó Wc(z-1) kifejezésben szereplő paraméterek és maga az algoritmus differenciaegyenlete:
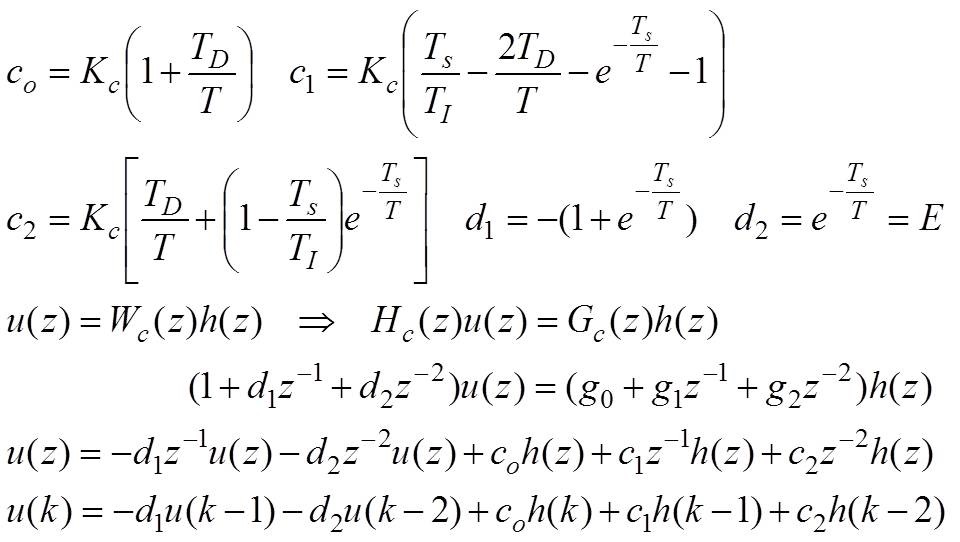
A Wc(s) átviteli függvénynek megfelelő Wc(z) impulzusátviteli függvény kiszámítását a Matlab [Gcz,Hcz]=c2dm(Gcs,Hcs,Ts,’zoh’); utasítása is támogatja, amely természetesen bármilyen folytonosidejű Wc(s)=Gc(s)/Hc(s) átviteli függvényhez kiszámítja a diszkrétidejű Wc(z)=Gc(z)/Hc(z) impulzusátviteli függvény Gc(z) és Hc(z) polinomjainak együtthatóit, ha Wc(s) mellett a Ts mintavételezési idő is ismert. Miután a szabályozási algoritmust egy digitális számítógépen futó program realizálja, az aktuális u(k) irányítójel kiszámításához a memóriában tárolt d1, d2, c0, c1, c2 paramétereken túlmenően ismerni kell az irányítójel u(k-1), u(k-2) megelőző értékeit, valamint a hibajel h(k) aktuális és h(k-1), h(k-2) megelőző értékeit is. A számítás műveletét a mintavételezés minden időpillanatában meg kell ismételni, és a kiszámított u(k) jelet azonnal a zoh bemenetére kell kiadni. A digitális számítógép μs nagyságrendben képes az u(k) meghatározására, ezért folyamatszabályozási alkalmazásokban – amikor is a Ts mintavételezési idő általában nagyobb, mint 1 s – feltételezhetjük, hogy az u(k) aktuális értéke a mintavételezési ütem pillanatában már rendelkezésre is áll [3].
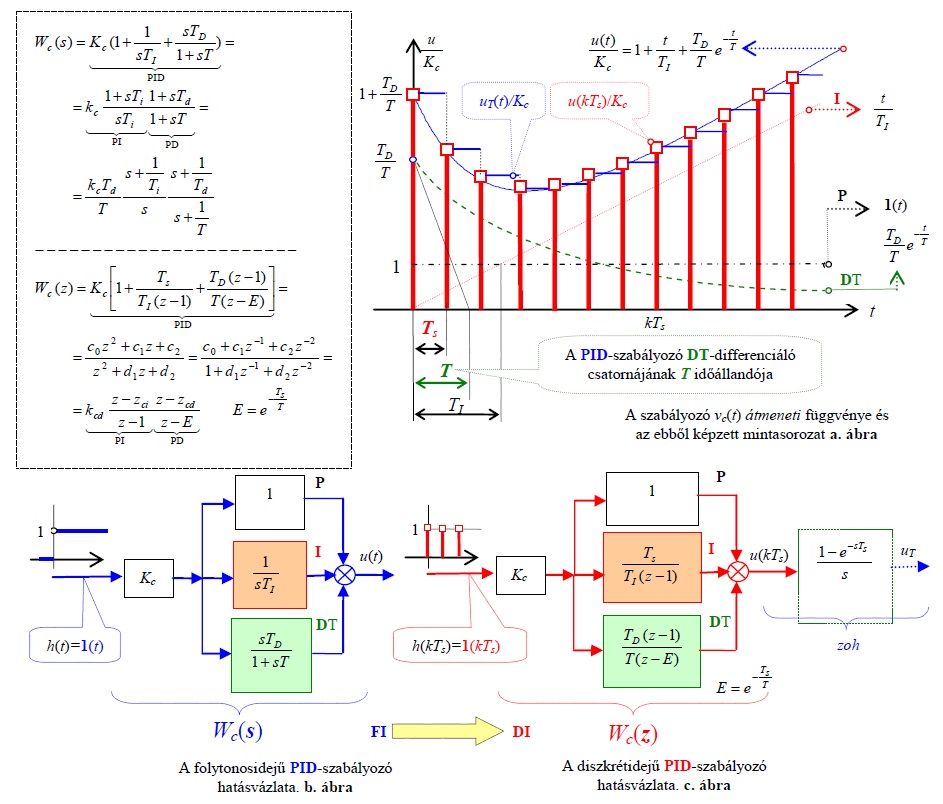
4. ábra Folytonosidejű szabályozó vc(t) átmeneti függvénye alapján származtatott diszkrétidejű szabályozó
4. A méretezés ellenőrzése:
Wc(z), Wp(s) és Ts ismeretében a közelítő FI-modell alapján méretezett rendszer tényleges tulajdonságait a működést leíró diszkrét jelekre és tagokra homogenizált modell alapján célszerű ellenőrizni. Ehhez meg kell határozni
• a folyamat Wp(z) impulzusátviteli függvényét,
• a diszkrétidejű nyitott kör W0d[exp(jωTs)]=a0d(ω)exp[jφ0d(ω)] frekvenciafüggvényének tényleges fázistöbbletét,
• a vágási körfrekvenciáját, valamint
• az egységminta-sorozat szerinti alapjel hatására a zárt rendszerben keletkező h(kTs), u(kTs), uT(t), y(t) és y(kTs) FI- és DI-válaszokat.
Ezeknek – miután a méretezéssel a folytonos rendszernek megfelelő működést kívántuk megvalósítani – jelentős mértékben kell hasonlítaniuk a folytonos rendszer megfelelő tulajdonságaihoz, ha a megengedett fázistöbbletromlásra elég alacsony értéket választottunk. Az ellenőrzéshez használt Matlab-támogatásokat a későbbiekben (a diszkrét modell alapján történő méretezéssel foglalkozó fejezetben) részletezzük.
Megjegyzés
• A Ts mintavételezési idő felvételénél körültekintően kell eljárni. Abból a puszta tényből, hogy a hibrid rendszer esetén egy Ts/2 nagyságrendbe eső járulékos holtidő kerül a zárt hatásláncba, következik, hogy helytelen (iddokolatlanul nagy) Ts-választás a folytonosan stabilis rendszert a hibrid működésmód labilissá teheti. A jelenség úgy is interpretálható, hogy a zárt hurok mintegy Ts ideig "nyitva" van, a kTs‹t‹(k+1)Ts időpontok között ugyanis az uT(t) irányítójel nem változik (vagyis a visszacsatolás hatása nem tud érvényesülni), ami "nagy" [4] Ts esetén gerjedéshez (labilis üzemállapothoz) vezethet. Ts minden határon túl történő csökkentése esetén a hibrid rendszer ugyan egyre jobban közelíti a folytonos rendszer tulajdonságait, és a járulékos holtidő egyre inkább elhanyagolhatóvá válik, de Ts csökkentésének a számítógép szabta technikai korlátai vannak [5].
• A folytonosidejű PID-szabályozó sTd/(1+sT) átviteli függvényű, egytárolós differenciáló taggal leírt differenciáló csatornája hozza létre az irányítójel (differenciáló hatás keltette) forszírozását. A szabályozó DT-csatornájának forszírozását létesítő jelterület:

Ezt a jelterületet az egytárolós differenciálófokozat átmeneti függvényének T időállandójával lecsengő exponenciális időfüggvényéből származik
(4. ábra). Ennek – a diszkretizálás és zoh miatti jelterületet növelő – „lépcsős torzulása” akkor hanyagolható el, ha Ts»T/20, ekkor ugyanis a forszírozásra fordított jelterület növekedés nem jelentős. Ez a Ts mintavételezési idő megválasztásának egy másik szempontja is lehet, de gyakran indokolatlanul kis értékű mintavételezési időhöz vezet.
Lényegét tekintve tehát a hibrid szabályozás FI-modellje alapján történő méretezés a korábbiakban részletesen feldolgozott és a folytonosidejű szabályozásokra vonatkozó elveknek megfelelően történik, eltérés a Ts mintavételezési idő megválasztásának és a méretezett folytonosidejű Wc(s) átviteli függvény diszkretizálásának eljárásában (a Wc(z) impulzusátviteli függvény, illetve az ennek megfelelő szabályozási algoritmus meghatározásában) van.
Megjegyzés
Az ipari folyamatszabályozási alkalmazások egy jelentős részében a folyamat időkésései és holtideje a másodperc–perc nagyságrendbe esnek, a DDC-szabályozók pedig igen gyors működésűek lehetnek. Az ilyen folyamatok szabályozására kifejlesztett univerzális kompakt szabályozók az A/D- és D/A-átalakítókat is tartalmazzák, és egységes jeltartományú analóg be-, és kimenőjelekkel rendelkeznek (pl. 4…20 mA, 0…10 V stb.). A felhasználó számára így mintegy folytonos (analóg) szabályozók jelennek meg, függetlenül attól, hogy belső jelterjedési viszonyaikat digitális jelek közötti hatásmechanizmusok írják le. Mintavételezési idejük igen kicsi és rendszerint nem is szabadon választható. Ezért az ilyen DDC-szabályozók kezelőszervei is olyanok, hogy a folytonos szabályozónak megfelelő Kc, TI, TD és T paraméter beállításokat teszik lehetővé, ezáltal alkalmazásukkal a kvázifolytonos működésmódot valósítják meg. Ez azt jelenti, hogy a mintavételezésnek a kompenzációs algoritmusra gyakorlatilag nincs hatása, ezért a diszkrétidejű rendszerről való beszédnek a szabályozás szempontjából nincs is jelentősége. A DDC-szabályozó ilyen esetben a folytonosidejű algoritmusoknak egyfajta realizálási technikáját jelenti. Ekkor természetesen elmarad a tervezett FI-szabályozó diszkretizálásának eljárása is, ezt ugyanis maga a szabályozó hajtja végre. A mintavételezési idő adott határon túl történő csökkentése sem ajánlott, mert ha a mintavételezés szüneteiben a jelek észrevehetően nem változnak, az igen kis változások kimutatása (az A/D- és D/A-átalakítók felbontóképességének indokolatlan növelése) is értelmét veszti. A mai kornak megfelelő érzékelőszervek egyre gyakrabban az A/D-átalakítási funkciót is tartalmazzák, és az y szabályozott jellemző számszerű kijelzésén túlmenően közvetlenül digitális jelet szolgáltathatnak a DDC-szabályozónak.
Folytatjuk!
Szerzők: Dr. Szilágyi Béla – Dr. Juhász Ferencné
[1] A Th holtidő jelenléte a szabályozási hurok belsejében igen kellemetlen üzemtani jelenséget eredményez, miután a holtidős tag bemenetén kifejtett gerjesztés hatására a holtidő időtartama alatt a kimeneten „nem történik semmi”, a gerjesztésre a holtidős tag ebben az időintervallumban nem reagál. Ez a késleltető hatás túlvezérléssel sem csökkenthető, és az y szabályozott jellemző késleltetésében is jelen van.
[2] Az FI-szabályozó tervezését az átviteli függvényének
Wc(s)=[kc(1+sTi)(1+sTd)]/[sTi(1+sT)]
PIPD-alakja alapján végezzük, majd ezt az alakot a párhuzamos struktúra PID-alakjára átszámítjuk (Kc: átviteli tényező, TI: integrálási idő, TD: differenciálási idő, T: időállandó). Ez utóbbi egyenértékű alakból ugyanis a szabályozó vc(t) átmeneti függvénye, vc(kTs) átmeneti mintasorozata, illetve Wc(s) átviteli függvényének megfelelő egységugrás ekvivalens (SRE) típusú Wc(z) impulzusátviteli függvénye egyszerűen meghatározható.
[3] Figyeljük meg, hogy a differenciálegyenlettel leírt FI-szabályozási algoritmus matematikailag lényegesen komplikáltabban kezelhető, mint a differenciaegyenlettel leírt diszkrét DI-algoritmus. Ez utóbbiban egy egyszerű értékadó utasítással számítható ki az irányítójel aktuális
u(k)=-d1u(k-1)-d2u(k-2)+c0h(k)+c1h(k-1)+c2h(k-2) értéke.
[4] Hogy mekkora a „nagy” Ts mintavételezési idő, azt a zárt szabályozási rendszer dinamikus tulajdonságait leíró eredő állapotmátrixának λRi sajátértékei, illetve TRi időállandói befolyásolják.
[5] Ha a diszkrétidejű aktuális u(kTs) irányítójel kiszámításának időigénye összemérhető a Ts mintavételezési idővel, akkor ez a járulékos holtidőt egy Ts értékkel tovább növelheti. Ez a jelenség azonban csak igen kis mintavételezési idő esetén állna elő.














