



Piezo- és piroelektromos átalakítók – 13.
Piezoelektromos nyomásmérők
A nyomásmérőknél szokásos abszolút nyomás-, túlnyomás-, nyomáskülönbség-mérő osztályozás csak a statikusan mérő eszközök esetében értelmezhető. Dinamikusan mérő piezoelektromos nyomásmérőknél csak nyomásmérőkről beszélünk, és speciális esetként említjük a két kivezetéssel ellátott dinamikus és kvázistatikus nyomáskülönbség-mérőket. Szokásos a nyomásmérők méréstartomány szerinti osztályozása is, miszerint néhány bar nyomásig alacsony nyomású, néhány 100 bar-ig általános felhasználású és 1 kbar felett pedig nagynyomású mérőkről beszélünk. A μbar tartományban működő érzékelők elnevezése piezoelektromos mikrofon.
Piezoelektromos nyomásmérők felépítése
Általánosságban a piezoelektromos nyomásmérők működésének alapja egy membrán által az erőmérő elemre ható erő mérése, amely erőt a mérendő nyomás hozza létre, és amely erőt a mérendő nyomás és a membrán effektív felületének a szorzata adja. Gondos szerkezeti kialakítás és fejlett gyártástechnológia szükséges ahhoz, hogy mindez megvalósuljon.
Érzékelőként elsősorban a méréstartománytól függő magasságú, tranzverzális működésű kvarckristályt alkalmazzák, nagyobb érzékenység elérése érdekében PZT-kerámiák felhasználására kerül sor, de a prizmatikus kialakítású formák helyett a nagyobb mechanikai érzékenységű, konzol típusú megoldásokat választják (például mikrofonokban).
Mindegyik kialakításban szóba kerülhet a dinamikus viselkedést modellező analóg helyettesítő képek és az elosztott paraméterű mechanikai hullámvezetők modelljének az alkalmazása. Ne feledjük, hogy a felső frekvenciahatár az erőmérőkhöz hasonlóan itt is 10 kHz nagyságrendű. A prizmatikus kialakítású tranzverzális érzékelők viselkedésének az elemzését a korábbi fejezetekben már áttekintettük, a konzolos kialakítás matematikailag meglehetősen nehezen kezelhető elemzésére célszerűen a szakirodalom tanulmányozását javasoljuk [1].
A dinamikus nyomásmérők alkalmazástechnikájában – például robbanómotorok hengerterének nyomásmérésében, lőfegyverek ballisztikai vizsgálatában – fontos zavaró paraméter a mérendő közeg hőmérséklete, amely kritikus estben magának az érzékelőnek a működésképtelenségét is okozhatja (Curie-hőmérséklet túllépése). Ennek elkerülésére többféle megoldás létezik: speciális membránkonstrukció, magasabb Curie-hőmérsékletű anyag választása, külső vízhűtés stb. Mindegyik megoldásnak megvan a maga előnye és hátránya. A nagysebességű hűtőfolyadék áramoltatása például rezgéseket kelt, ami kellemetlen abból a szempontból, hogy a nyomásmérő ezt gyorsulásmérőként detektálja.
Gyorsuláskompenzált nyomásmérők
A különbségi mérési elv alkalmazására kitűnő példa a nyomásmérőkben használt gyorsuláskompenzáció. A probléma gyökere abban keresendő, hogy a dinamikus nyomásmérőt az időben változó nyomású közeget tartalmazó mechanikai szerkezetre (tartályra, csővezetékre) szerelik fel, ami a változó nyomás hatására rezgésbe jöhet. Ebben az estben a nyomásmérőben elhelyezett tömegek – egyébként fontos szerkezeti elemek – szeizmikus tömeggel a nyomásmérő gyorsulásmérőként viselkedik, és az így adódó gyorsulásarányos jel a nyomásra kapott kimeneti jelet torzítja. Megoldást jelent a gyorsuláskompezált kialakítás, amelynek az elvét az 54. ábrán látható, x-irányban longitudinális kvarckristályos érzékelővel valósíthatjuk meg.
A megoldás lényege az, hogy a gyorsuláskompenzációhoz 2 db különböző eredő érzékenységű piezoelektromos elemet alkalmaznak. Az 1. ábra mechanikai modellje a 2. ábrán látható. Az első piezoelektromos elem 3 db K1-, K2- és K3-jelű, a második pedig a K4-jelű, egyetlen kvarctárcsából áll. Általánosságban a tehetetlenségi erőkért felelős tömegeket és a két piezoelektromos elem érzékenységét úgy választják meg, hogy a tehetetlenségi erők mindkét érzékelőelemben azonos piezoelektromos jelet hozzanak létre. Mivel a két elem egymással szemben polarizált, a gyorsulásfüggő jelek eltűnnek. A mért nyomás ezzel szemben a két piezoelektromos elemben különböző nagyságú jeleket hoz létre, amelyek különbsége a kimeneten a nyomással arányos.
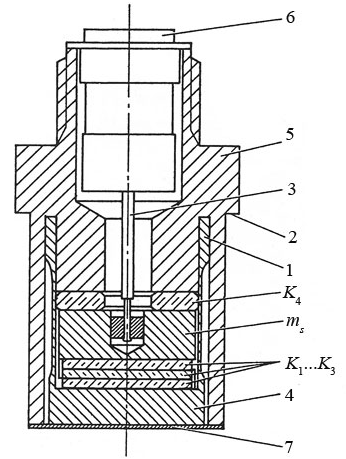
1. ábra Kistler-gyártmányú, gyorsuláskompenzált nyomásmérő szerkezeti felépítése
1) Előfeszítő hüvely
2) Tömítőfelület
3) E2-, E4- és E6-jelű elektródák kivezetése a
csatlakozóhoz
4) Nyomástovábbító közdarab
5) A nyomásmérő háza
6) Villamos csatlakozó
7) Membrán
K1…K4 Longitudinális kvarctárcsák
ms Szeizmikus tömeg
2. ábra Az 54. ábrán látható gyorsuláskompenzált nyomásmérő sematikus felépítése
E1…E6 Elektródák
F A gyorsulás következtében a K1…K3 érzékelőkre ható
tehetetlenségi erő
F* A gyorsulás következtében a K4 érzékelőre ható
tehetetlenségi erő
K1…K4 Longitudinális kvarcérzékelők (a nyilak jelentik a
kristálytani c-tengely pozitív irányát)
a A nyomásmérőre ható gyorsulás
mD A nyomásközvetítő közdarab tömege
mM A membrán tömege
mS A gyorsuláskompenzáló szeizmikus tömeg
p A mérendő nyomás
A kvantitatív vizsgálathoz elsőként – az egyszerűség kedvéért – tételezzük fel, hogy a gyorsulásérzékenység csak az mM membrántömeg, az mD nyomásközvetítő közdarab tömege, valamint az mS gyorsuláskompenzáló szeizmikus tömeg révén jön létre. Tételezzük fel továbbá, hogy az a gyorsulás x-irányú, és a gyorsuláskompenzációt is csak ebben az irányban kell végrehajtanunk. A rendszer mechanikai előfeszítését előállító szorítóhüvely (1. ábra 1-jelű alkatrésze) erősöntölő hatásától eltekintünk.
A K1-, K2- és K3-jelű, tárcsa alakú érzékelők piezoelektromos együtthatója d11, a K4-jelű elemé pedig d11*. Az érzékelők orientációja az 55. ábrán látható. Az E1, E3 és E5 elektródák villamosan földeltek, az E2-, E4- és E6-jelűek pedig egymással össze vannak kötve, és a kimenőjelet szolgáltatják. A K1-, K2- és K3-jelű piezoelektromos érzékelőkre ható – gyorsulásból származó – tehetetlenségi erő
F=(mM+mD)a,
a K4-jelű érzékelőre pedig
F*=(mM+mD+mS)a.
Ennek következtében az E2- és E4-jelű elektródákon megjelenő eredő polarizációs töltés
Q=3d11(mM+mD)a,
ezzel szemben az E6-jelű elektródán lévő töltés
Q*=-d11*(mM+mD+mS)a
nagyságú. A gyorsuláskompenzációhoz a két töltésnek semlegesítenie kell egymást, vagyis
Q+Q*=3d11(mM+mD)a-d11*(mM+mD+mS)a=0
feltételnek kell teljesülnie, amiből
mS=2(mM+mD).
Nyomásmérésnél minden érzékelőre ugyanabból a nyomásból származó Fp erő hat, vagyis az általa létrehozott töltés
Qp=(3d11-d11*)Fp=2d11Fp.
Az effektív piezoelektromos nyomásérzékenység tehát két piezoelektromos érzékelőelemből álló nyomásmérőnek felel meg. Az anyagok megfelelő megválasztásával vagy a kivágási irányok módosításával elérhető, hogy d11˃˃d11*, amivel
![]()
Szerkezetében egyszerűbb, megoldásában igen szellemes megoldást jelent az érzékenység növeléséhez a nyomásmérőkben gyakran alkalmazott – kvarcból készült – tranzverzális hatással működő gyorsuláskompenzáció (3. ábra).
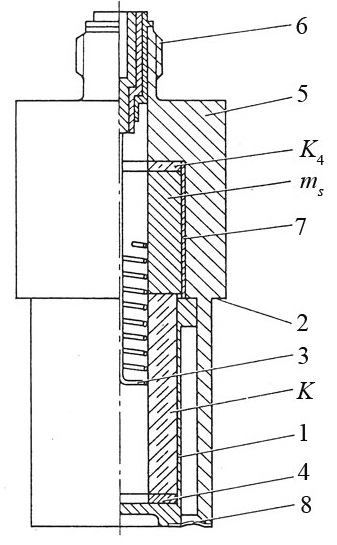
3. ábra Kistler-gyártmányú, gyorsuláskompenzált nyomásmérő szerkezeti felépítése tranzverzális kvarckristály felhasználásával
1) Előfeszítő hüvely
2) Tömítőfelület
3) Kontaktusrugó a tranzverzális kvarcelem felületére gőzölt
elektróda, a longitudinális hatást kifejtő mS-jelű szeizmikus
tömeg és a 6-jelű csatlakozó között
4) Nyomásközvetítő közdarab
5) A nyomásmérő háza
6) Csatlakozó
7) Szigetelőréteg
K Tranzverzális működésű kvarckristály
K4 Longitudinális működésű kvarckristály
8) Mérőmembrán
A d12 tranzverzális piezoelektromos együtthatójú (α-kvacnál d12=-d11) kvarckristály mechanikai keresztmetszete legyen AS, a villamos elektródáé pedig AE. A gyorsuláskompenzációhoz egy longitudinális, gyűrű alakú elem szolgál, amelynek piezoelektromos együtthatója d11. A gyorsuláskompenzációhoz szükséges mS tömeg most az

képletből számítható ki. Mindkét számítás finomítható további elemek (például az érzékelők és az elektródák) tömegének a figyelembevételével. Az ismertetett eljárás az irodalomban „tömegerőkizárás”-néven is ismert.
Piezoelektromos transzlátorok
Az inverz piezoelektromos hatás alapján működő, a szakirodalomban transzlátornak nevezett átalakítók – amelyeket korábban csak hangszórókban használtak fel – napjainkban egyre fontosabbakká válnak az ún. mikro-robottechnikában, ahol rendkívül nagy felbontóképességgel kell mozgásokat létrehozni (például mikroszkópok tárgylemezének mozgatása, mikromanipulátorok stb.). Tekintettel arra, hogy az ilyen műszaki feladatban egyébként a viszonylag minél nagyobb elmozdulás az elérendő cél, gyakorlatilag az anyagválasztékból csak a piezoelektromos kerámiák jönnek számításba. Az átalakítók kialakítási formájában pedig az érzékelők lineáris deformációját közvetlenül felhasználó kialakítások helyett (amelyeknél vagy túlságosan nagy feszültség vagy szerkezetileg nehezen megvalósíthatóan sok elem mechanikai sorba kapcsolása válna szükségessé) elsősorban a konzolszerű kialakítást választják (4.a. ábra).
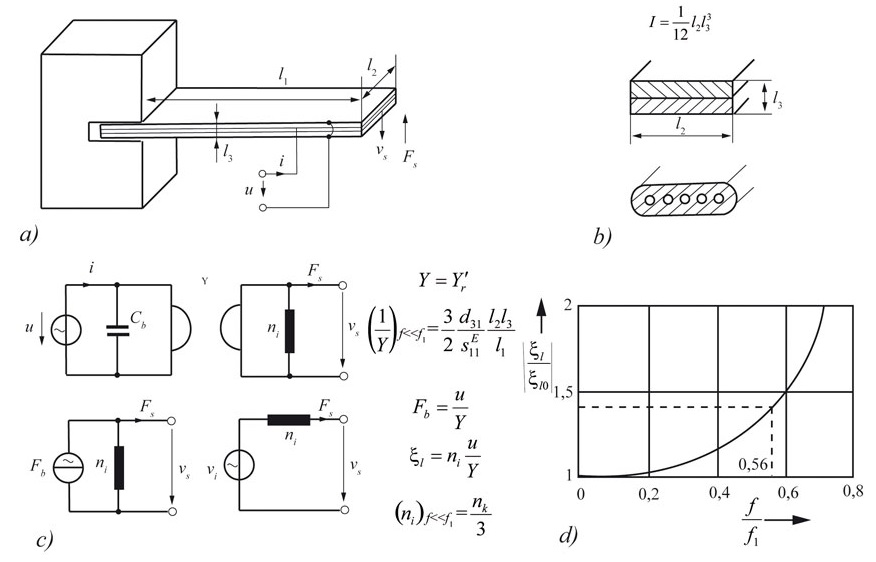
4. ábra Piezoelektromos transzlátor elvi szerkezeti felépítése és dinamikai modellje
Az átalakító két ellentétes irányban polarizált, tranzverzális hatás alapján működő piezoelektromos kerámialap összeragasztásával jön létre. Mechanikailag a konstrukció egyik végén befogott tartó (konzol). Az átalakítók az u feszültség hatására ellentétes irányban deformálódnak (például a felső rövidül, az alsó pedig megnyúlik), aminek következtében a tartó meghajlik, szabad vége elmozdul (a választott esetben felfelé). Az összeragasztott felületeken kiképzett elektródokat hosszirányú, grafittal kitöltött furatokkal is lehet helyettesíteni (4.b ábra). A gyakorlatban választott működtető frekvencia nagyságrendje szükségesé teszi az átalakító mechanikai tulajdonságainak elosztott paraméterű modellezését. Tekintettel arra, hogy az átalakítóban a makroszkopikus F erő- és v sebességváltozókon kívül M nyomaték és Ω szögsebesség is létrejön, a mechanikai modellalkotás és tulajdonságainak matematikai leírása lényegesen bonyolultabb a korábban ismertetett tisztán tranzverzális, illetve longitudinális eseteknél. Ezért ennek közlésétől terjedelmi okok miatt eltekintünk. Az érdeklődők számára a szakirodalmat [2] ajánljuk.
A 4.c. ábrán már a levezetések végeredményei alapján készült analóg helyettesítő képet láthatjuk az átalakító f1 első rezonanciafrekvenciájánál kisebb frekvenciákra (f1˃f). Ez a feltétel a szokásos kialakítások estében – amint azt a későbbiekben közölt számpéldával is alátámasztjuk – helyénvaló megközelítés. A modellalkotás során a számításokból kiderül, hogy az átalakító analóg helyettesítő képének elemei mind a frekvencia bonyolult függvényei, és csak f1˃˃f esetben válnak a 4.c ábrán feltüntetett frekvenciafüggetlen elemekké. Ha az átalakítót kis belső ellenállású feszültséggenerátorral gerjesztjük, akkor a Cb kapacitás elhanyagolható, és a 4.c ábra helyettesítő képe alapján
![]()
amelyből integrálás után a ξl kitérés

A 4.d ábra diagramján látható az említett egyszerűsített feltételek esetén kapott amplitúdókarakterisztika. A 3 dB-es pontja megközelítőleg az f1 első rezonanciafrekvencia felénél van.
Szemléltetésképpen vizsgáljuk meg egy Piezolan-S típusú kerámiából készült transzlátor jellemző dinamikus jellemzőit. A kiindulási adatok:
d31=9∙10-11 AsN-1, k31=28%, l1=20 mm, l3=0,4 mm, u=100 V.
Behelyettesítés után ξ0=94 μm, és az itt nem részletezett számításokból f1=480 Hz. A 4.d ábra alapján például a 10%-os üresjárási amplitúdótúllépés határfrekvenciája f=154 Hz-nél van. A 4. ábrán látható mechanikai konstrukció fülhallgatókban vagy fénysugarak kitérítésének vezérlésére használható (ha a konzol végére tükröt erősítünk).
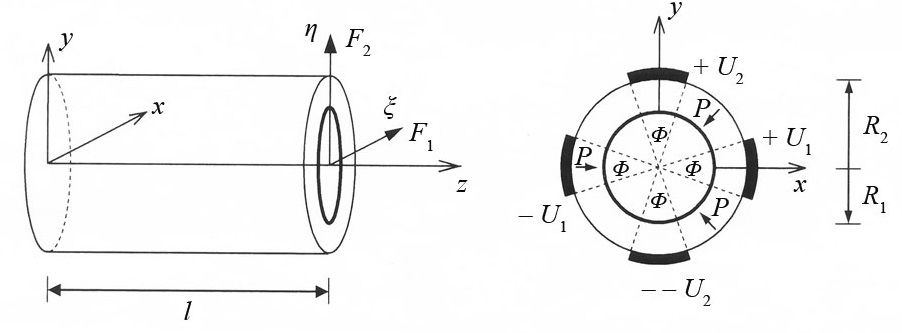
5. ábra Cső alakú, piezoelektromos transzlátor mikro-robottechnikai felhasználásra
Robottechnikai felhasználásra – elsősorban a többirányú mozgatás megvalósítása érdekében – például egy cső alakú kerámiaelemet alkalmaznak az 5. ábrán látható kialakításban [3]. A transzlátor 20 mm hosszú, 3 mm külső és 1,5 mm belső átmérőjű csődarab, amelyen 5 db elektróda található. Ezek közül 4 db a cső külső felületén szimmetrikusan, négy azonos méretű (Φ központi szöggel meghatározott) szegmensben helyezkedik el, az ötödik a cső belső felületét teljesen kitölti. Piezoelektromos szempontból valamelyik külső és a belső elektródára adott feszültség a csövet meghajlítja. Természetesen a geometriai forma miatt a deformáció meghatározása meglehetősen bonyolult, de a megfelelő elektródára adott -U1, +U1 vezérlőfeszültségekkel a cső vége az x – y-síkban ξ, η mértékben elmozdítható.
Ha a csőelemet egy robot testéhez rögzítjük, és a másik végével pedig egy szilárd alapra helyezzük, akkor a 6. ábrának megfelelő lépéselemekkel (a létrehozott deformációval) a robottest az alaphoz képest elmozdítható. A robotnak minimálisan három lába van, amelyeket a megfelelő sorrendben vezérelve a 6.a vagy b ábrának megfelelően a robottestet mozgatni lehet.

59. ábra Piezoelektromos transzlátorból kialakított mikrorobot láb kétfajta mozgása egy lépés megtétele során
A baloldali ábra szerint egy-egy láb elektródáira olyan feszültségsorozatot kapcsolunk, amely az A1 kiinduló helyzetből először a láb összehúzódását, ezáltal felemelését (A2), elhajlítását és kinyújtását, ezt követően pedig egy kismértékű elmozdulás utáni lerakását (A3), végül kiegyenesítését (A4) eredményezi. A deformációsorozatot megfelelő sebességgel és a lábak összehangolt vezérlésével végrehajtva a mikrorobot teste elmozdul, a robot megtesz egy lépést. A lépés végrehajtása során, amikor a robot lábai a „talajon” vannak, tapadva (a súrlódó erővel) segítik a robot elmozdulását, azonban a felemelésük alkalmával a robot teste kissé megbillen, ezáltal imbolygóvá válik a mozgás.
Egy másik megoldásban (6. ábra jobb oldala) a lábak nem emelkednek fel, hanem a kiinduló helyzetből (B1) egy gyors feszültségváltással a talajon előrecsúsznak (B2), majd lassan kiegyenesednek, miközben a robot teste előremozdul (B3). A mérési adatok alapján a mikrorobot egy lépéssel kb. 3…5 μm-t mozdul el, a haladási sebesség pedig elérheti az 1…5 mms-1 értéket.
A működési elv mikromanipulátor kialakítására is lehetőséget ad. A gyakorlati kialakítás még kutatási stádiumban van.
A fenti folytatással a piezo- piroelektromos átalakítók témakörének tárgyalása befejeződött.
Szerző: Dr. Fock Károly
Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
[1] A. Lenk: Elektromechanische Systeme, Band 2: Systeme mit verteilten Parametern, VEB Verlag Technik Berlin, 1974
[2] A. Lenk: Elektromechanische Systeme, Band 2: Systeme mit verteilten Parametern, VEB Verlag Technik Berlin, 1974
[3] Felső G.: Mikromanipulációs robotrendszerek modellezése és vizuális alapú poziciómérési eljárásai, Budapesti Műszaki és Gazdaságtudományi Egyetem, Irányítástechnika és Informatika Tanszék, Budapest, 2007. PhD értekezés














