



Individual warm sensing model creation using the Fuzzy method
 Nowadays, artificial intelligence can be found in our environment step by step. Many smart city applications also use algorithms based on machine learning and artificial intelligence. This includes smart homes and their solutions as well.
Nowadays, artificial intelligence can be found in our environment step by step. Many smart city applications also use algorithms based on machine learning and artificial intelligence. This includes smart homes and their solutions as well.
At the same time, surprisingly, there are very few such solutions in the section of building automation. There is a lack of effective solutions to the more complex problems, that can be modeled as nonlinear problems. One such area is the sensation of warmth that could be used for upgraded regulation of cooling and heating systems to provide a better personal comfort. However, in practice they are very rarely taken into practice. One of the main reasons is that we encounter technologies that are far surpassed in terms of industrial applications. These cannot handle nonlinearities. In the context of this publication, I will provide an opportunity to temper a room for a sense of warmth using a fuzzy artificial intelligence algorithm.
Artificial intelligent based oppurtunities
In the subject of warmth sensation, reality is highly nonlinear. As a result, traditional algorithms and standard solutions would not work properly. Many of the modern technologies are able to handle various nonlinearities with little error. As a result, it is no longer necessary to modify techniques based on older PLCs to the desired specification. There are a number of possibilities that make the question worth exploring. Several artificial intelligence methods seem to be suitable for the solution.
One possible solution based on artificial intelligence is to adapt the problem to a fuzzy system. A fuzzy system basically requires an expert[1][2]. In the current case, this is the owner / customer. A fuzzy system is basically made up of inputs, outputs, and rules [1][2]. The aforementioned expert would be needed to draw up the appropriate rules. Regarding the input and output variables, it should be mentioned that fuzzy systems are characterized by the fact that they are not sharp but so-called fuzzy sets. [1]. This means that the input or output belongs to the set with some probability, to some extent.
Implementation
The range of factors influencing the sensation of warmth is quite great. I would like to talk about some clear, physically demonstrable influencing factors. The temperature itself is primary, of course. The dependence of the warmth sensation on the relative humidity, the air movement sensation or the temperatures of the surrounding surfaces and the amount of heat radiation received from it is also strong. In addition, the components derived from clothing are essential as well. Furthermore, it may be worthwhile to examine the level of fatigue. It is an accepted fact that some people are much more sensitive to their level of fatigue in terms of warmth sensation. In our case, since there is no measure that expresses fatigue properly, I will simply scale how tired the imaginary person is on a scale of 1 to 6, where an increase in value also indicates an increase in the level of fatigue.
Fuzzy system
The fuzzy system I chose is using a Mamdani-type system with triangular membership function. It has six input variables (Temperature, Humidity, Air movement, Surface Temperature, Fatigue, Clothing) and one output variable (Individual Heat Prediction) where the peron has cold at 0, has warmth at 1, and feels comfortable at 0.5 under the given conditions.
The existing system must use fuzzy rules through different standards. The standard classification of my fuzzy system is the Mamdani sum-min type. This is why it is advantageous to choose addition as the S norm, because in this case many more rules are included in the evaluation method. Accordingly, a bad rule is less likely to affect the output in the wrong direction. In addition, it is not negligible that the change in this is finer in terms of output than in the max case, so the continuous change in the input parameters may lead to smaller jumps in the output. This is positive, of course, as it is less likely to cause a change between the three output options.

1. figure Summary of the fuzzy system
A total of 285 rules were created, faithfully to the database, as one rule could be formed from each row of the added database. There may be exiguous rules in certain value ranges, so it simply does not provide enough coverage in the fuzzy rule system. I do not want to examine this problem further, as such a case can typically occur in the case of an unrealistic set of parameters that does not probable in reality.
Testing the Fuzzy system
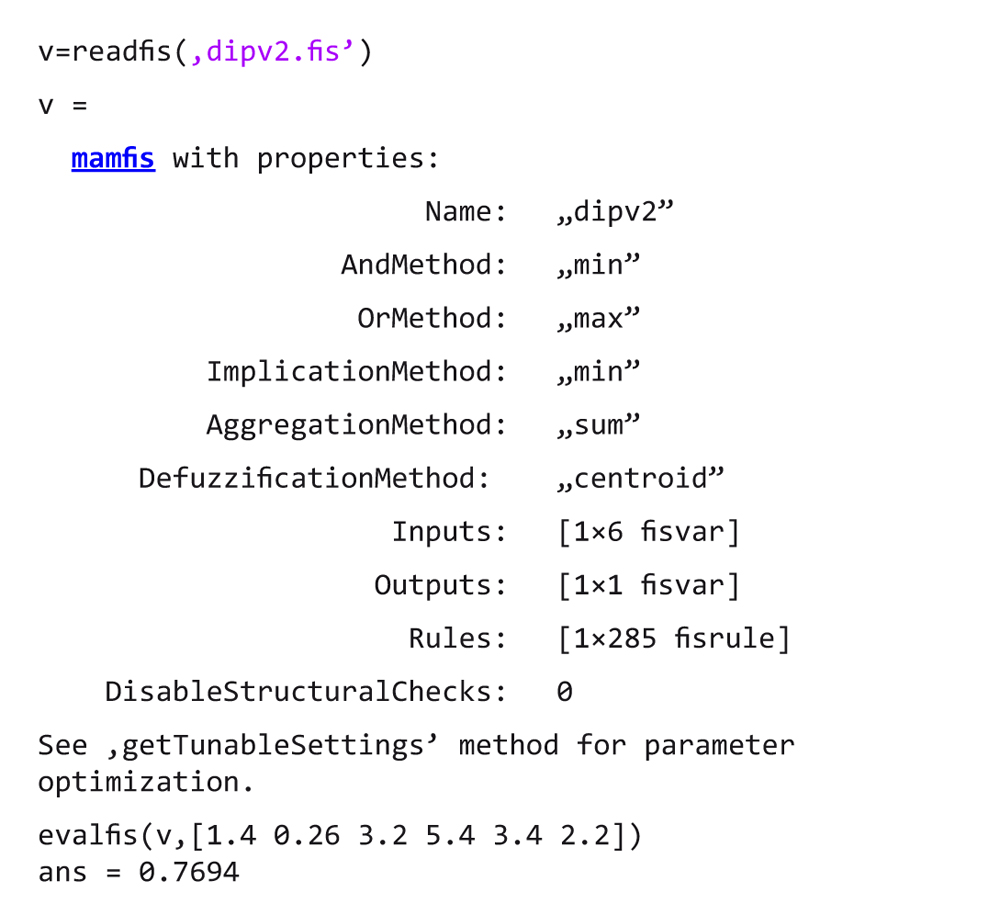
Let's test the fuzzy system. First, look at the value of the output in the database relatively to the predefined outputs. Evaluations are simply numerical. First I use the readfis command to store the fuzzy system in a variable, called v, then I use the evalfis function with the inputs [3]. An example of this (hereafter only the evalfis functions are presented, since the fis system itself does not change):

2. figure An example of a fuzzy triangular variable (temperature)
The distribution of the temperature fuzzy input variable membership function is shown, which membership functions are shaped triangular. Similarly adapted figures are exist for the other inputs. The fuzzy system is also advantageous in our case because it anoints the values instead of the crisp inputs, thus smoothing out the uncertainty arising from human judgment. Thus, in the case of sufficient number of rules, a two erroneous evaluation for similar parameters “under the law of large numbers” is taken into account to a small extent. In this publication I examine five sets of random test points. Aware of all this, let’s look at the following test point:
![]()
It can be seen that for this input vector the system has clearly released that the person is feeling well under the conditions now prevailing in the room. It means 24.5 °C, 45% relative humidity, little air movement. The surface temperature is 23.5 °C, its level of fatigue is relatively tired (typically in the evening) and could wear long pants, can be roughly matched by a short-sleeved T-shirt. If we imagine ourselves in this situation, we can say that absolutely, it is very close to the perfect comfort for an average person. Let's look at the following two cases.
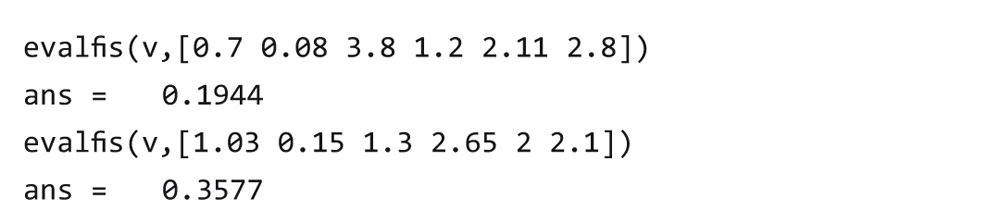
Here, in both cases, we come to the conclusion that there is a relatively cold feeling according to our rules. In the first case, it is extremely cold, as almost all the factors here are in the range that increases the feeling of freezing, while in the second case, the model is perhaps best compared to a simple winter day. In the latter case, all values are a bit more favorable, but there is no air movement, as we do not ventilate much in winter anyway. In conclusion, both cases are cold and it is worthwhile to increase the heating output. Let's look at two more examples in the other direction:
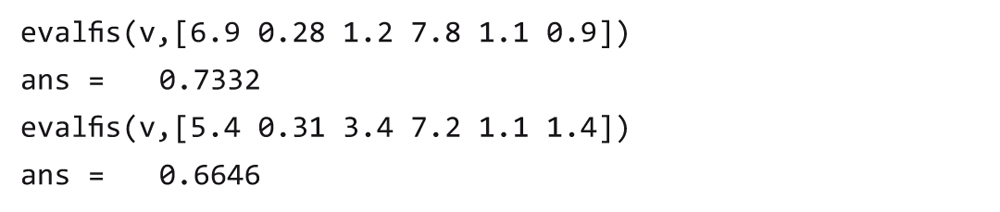
The first one is a case where each input pulls the output hard to the direction of the warm status. In the second case, together with a larger ventilation, we look at a typical day (e.g., the window in the kitchen is open during cooking). It is clear that the indoor temperature is above 27 °C and the surface temperature is similar. In addition, relative humidity and clothing input are also reflects a typical day of summer. Aware of all this and browsing through the data, it can be observed here that it is appropriate to provide a warm output value from the system.
I performed various other tests by looking at the response of the system to certain parameters while keeping the other parameters fixed. It was found in the example system that temperature and air movement are very prominent in the model, while relative humidity and Clo number in terms of wear bring the slightest change in most ranges. however, these studies are a function of the individual and the system of rules created for the individual, so they are not relevant for validation. Yet rather the thermal sensitivity conditions of the given individual can be mapped in this way.
As a summary, a lot depends on the rules. It is important to emphasize that based on an infinite number of rules, the optimal prediction of an individual can be achieved with an infinitesimally small approximation, as it smooths out uncertainties, rules that do not reflect reality. It is also worth noting that the fuzzy system is not sensitive to a parameter. This feature is valuable if we look at conditions globally, but it can be a bit problematic if one of the parameters fluctuates a lot, as it only shows a significant change in the case of extreme fluctuations.
It is advisable to create at least five vale ranges (eg valve position) in addition to the fuzzy system (this can also be done with a separate fuzzy controller), but of course much more detailed analog valve control can be provided as well. It is also worth noting that the appropriate band should not be taken too wide, as due to the properties of the fuzzy mesh (relatively wide membership functions, sum norm) a negligible number of opposite evaluations will almost always pull in the other (unexpected) direction, thus involuntarily approaching the 0.5 value. Consequently a band of 0.45-0.55 is recommended, for example, which would indicate the neutral range, in which case physical control would not be active. In addition, two narrower bands should be chosen to compensate for moderate fluctuations. Finally, any remaining extreme range could results significant cooling or heating. Another advantage of this method is if moderate change is sufficient, the system will never deviate from critical conditions. This saves a lot of energy, as unnecessary cold or hot energy is less likely to be realized, and unnecessary oscillations can be eliminated from the control.
Bibliography:
- [1] Dr. István Harmati (2020): Artificial intelligent based control.
- [2] Béla Lantos (2002): Fuzzy systems and genetic algorythms. Műegyetemi kiadó.
- [3] Fuzzy logic toolbox documentation. https://www.mathworks.com/help/fuzzy/ (2022. 03.18. last download)
Author: Bálint Németh
email: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.














