



Ultrahangos eszközök használata távolságmérésre
 Az ultrahangimpulzusok visszaverődésén alapuló távolságmérés aránylag egyszerű feladat – az ultrahangos jelátalakítón kívül a mikrovezérlők programozhatóságával és analóg perifériakészletével szinte teljes egészében megoldható.
Az ultrahangimpulzusok visszaverődésén alapuló távolságmérés aránylag egyszerű feladat – az ultrahangos jelátalakítón kívül a mikrovezérlők programozhatóságával és analóg perifériakészletével szinte teljes egészében megoldható.
Az ultrahangos távolságmérés
Az ultrahangos távolságméréshez mindössze egy ultrahangos jelátalakítóra, egy műveleti erősítőre, valamint egy – legalább négy szabad I/O-kivezetéssel és beépített komparátorral ellátott – mikorvezérlőre (MCU) van szükség.
Ahhoz, hogy a működést megérthessük, tételezzük fel, hogy egy ultrahangos jeladó 40 kHz-es implzusokat állít elő, vagy néhány rezgést végez azon a frekvencián. Az MCU képes az ehhez szükséges négyszöghullámmal meghajtani az ultrahang-jelátalakítót.
A kibocsátott ultrahangjel bármiről visszaverődik, ami a levegőnél nagyobb sűrűségű, ezért a kibocsátott jel energiájának egy bizonyos része visszaverődik a vevőbe. A jel oda-vissza terjedési ideje mérhető, és a levegőben terjedő hang sebességének ismeretében távolsággá számítható át.
A hang terjedéséhez valamilyen közvetítő közegre – levegőre, vízre vagy acélra stb. – van szükség. Általában minél sűrűbb a közvetítő közeg, annál gyorsabban terjed benne a hang. A hang terjedési sebessége levegőben a hőmérséklettől, a nedvességtartalomtól és a légnyomástól (tehát például a tengerszint feletti magasságtól) is függ. Szobahőmérsékleten 343 m/s körüli állandónak tételezhető fel. Az ebből következő terjedési idők – néhány méteres távolságokat feltételezve – könnyen mérhetők MCU segítségével.
A visszaverő felület típusa nem kritikus, mivel egy 40 kHz-es ultrahangjel csaknem minden felületről visszaveri a beeső ultrahangimpulzust. A merőleges beesés viszont hasznos, mivel ez esetben a beeső hullám közvetlenül a vevő felé verődik vissza. A merőlegestől eltérő beesési szög esetén a beeső jelnek kisebb hányada verődik vissza a vevőhöz.
Egy ultrahangos jeladó az elektronikus eszközökben hangjelzésre gyakran használt piezoátalakítókhoz[1] hasonlóan működik, de azokénál magasabb, az ember által nem érzékelhető frekvencián. Amikor egy piezoelektromos eszközön töltést halmozunk fel, annak hatására megváltoztatja a méretét vagy alakját – például meghajlik. A töltés eltávolítása után pedig visszanyeri eredeti alakját. Ha tehát egy 40 kHz-es elektromos jelet kapcsolunk az eszközre, az egy 40 kHz-es hangimpulzust bocsát ki. Az ultrahangvevő épp ellentétes módon működik: ha ultrahang éri, és az rezgésbe hozza, feszültség keletkezik rajta, de sokkal kisebb amplitúdójú, mint amelyet az adókristály gerjesztésére használtunk.
Egy ultrahang-átalakítóeszköz használható adóként, vevőként vagy mindkét szerepben, és létezik nyitott és vízmentesen zárt kivitelben.
Az 1. ábra egy ultrahangos jelátalakító elektromos helyettesítőképét mutatja. Alacsony frekvencián ez kapacitív terhelésnek tekinthető, azonban a frekvencia növekedtével az induktív komponens is egyre inkább érezteti hatását. A kétféle hatás a rezonanciafrekvencián (esetünkben 40 kHz-en) kerül egyensúlyba. Ha az adóelektronikát ezen a frekvencián működtetjük, az adó maximális amplitúdójú ultrahangjelet bocsát ki, és a vevő is ezen a frekvenciád ad maximális feszültséget. Az utrahangos jelátalakító tehát szűrőként viselkedik, a rezonanciafrekvenciától eltérő frekvenciájú jeleket elnyomja. Ez nagyon hasznos tulajdonság, mivel a rezonanciafrekvenciától eltérő frekvenciájú zajokat kevésbé engedi érvényesülni a vett jelet erősítő áramkörben. A helyettesítőkép tipikus értékeit az 1. ábra alján látható táblázat mutatja.

1. ábra Az ultrahangos jelátalakító elektromos helyettesítő képe
Az ultrahangos átalakító meghajtása
Egy kapacitív ultrahangos átalakító maximális adási jelerősségét differenciális meghajtójellel érhetjük el, amelynek zérus az átlagos feszültsége. Ha az átalakítót differenciális (ellenütemű) jellel hajtjuk meg, az feleslegessé teszi a kettős tápfeszültség-ellátást.
Az utrahangos jelátalakítók általános problémája, hogy a meghajtójel megszűnése után még egy ideig tovább rezegnek. Ez az átalakító mechanikai rezonanciájának következménye. Az adóelektronikát úgy hangolják, hogy a jelátalakító ultrahangtartományba eső sajátfrekvenciáján rezegjen. Az ultrahangadó a gerjesztő jel megszűnése után is még egy ideig – egy megkondított haranghoz hasonlóan – csillapodó rezgést végez. Amíg az adóként használt jelátalakító rezeg, a jel az áramkörön át elektromosan, vagy a levegőn át akusztikusan átjut a vevőátalakítóba, és ott a vett jelhez hasonló hatást vált ki. Ennek a zavaró hatásnak az elkerülésére késleltetni kell a vevőáramkör bekapcsolását egészen addig, míg az adó jele le nem csillapodik. Ennek a csillapított rezgésnek az időtartama adja azt a minimális késleltetést, amely meghatározza, hogy mi az a minimális távolság, amit a távolságmérőnkkel mérhetünk (lásd a 2. ábrát).
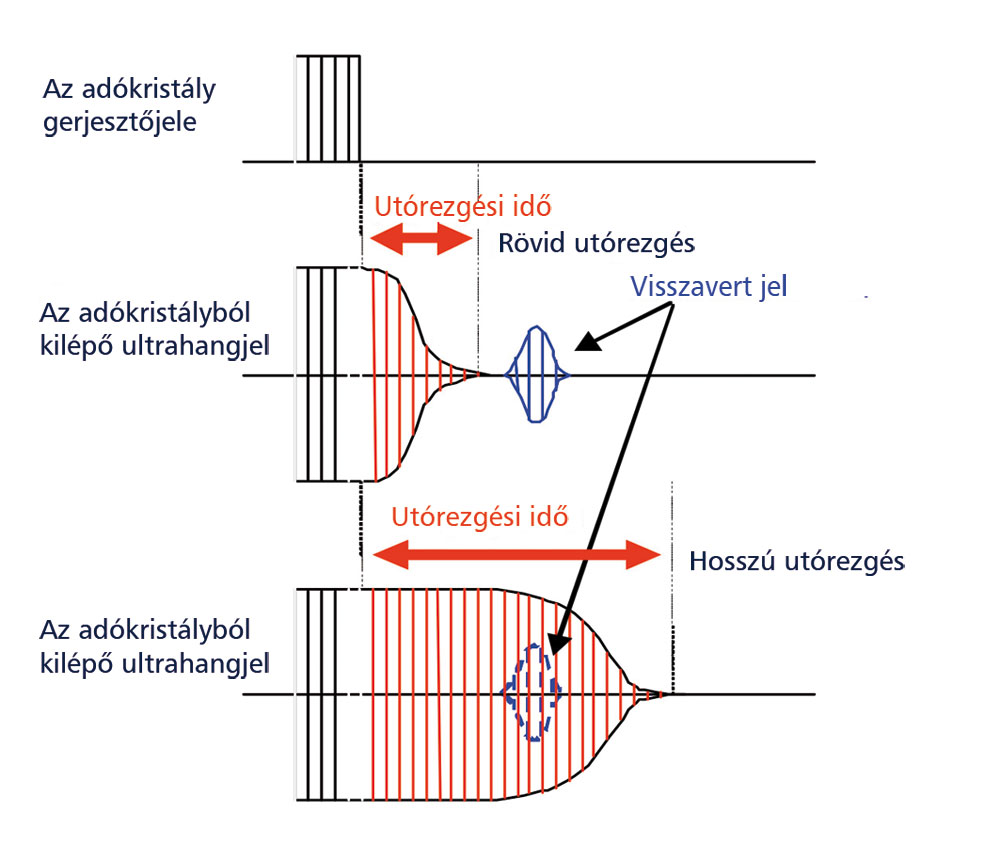
2. ábra Az ultrahangos jelátalakító utórezgési jelensége rövid és hosszú utátórezgésű adóátalakítónál
Az ultrahang-átalakítókat a legjobb olyan közel működtetni a névleges frekvenciájukhoz, amennyire csak lehetséges, mivel ez növeli a kilépő ultrahang-teljesítményt. A Microchip PIC16F690 8 MHz-es belső oszcillátorának frekvenciáját könnyű úgy leosztani, hogy előállítása a 40 kHz-es meghajtójelet.
A mikrovezérlő két I/O-csatlakozó kivezetésének felhasználásával létrehozható az ultrahangadó differenciális meghajtójele.
A 40 kHz-es jel időalapjául például az MCU Timer0 időzítőjével megvalósított „programmegszakítás túlcsorduláskor” (Interrupt-On-Overflow) funkciót használhatjuk.
Az ultrahangjeladó megvalósításának egy másik, „erősebben automatizált” módja a számos PIC-mikrovezérlőbe beépített ECCP[2]-modul felhasználása. Ez a modul úgy is konfigurálható, hogy egy kívánt frekvenciájú, impulzusszélesség-modulált (PWM) jelsorozatot generáljon két digitális kimeneten (a P1A-n és a P1B-n) félhidas kapcsolók vezérlésére úgy, hogy a két kimenet egymás ellentettje. Az ECCP-modul a Timer2-t felhasználva valósítja meg a PWM időalapját. A felhasználó úgy is programozhatja a Timer2 számlálóját, hogy egy adott számú impulzust állítson elő, mielőtt a megszakítási jelzőbitet (flag-et) beállítaná. Ezzel a megoldással lehetségessé válik, hogy a kívánt frekvenciájú ultrahangjelet egyetlen programmegszakítás felhasználásával állítsuk elő.
Ha már rendelkezésre áll az ultrahangos jelátalakító vezérlésére használható jelsorozat, a következő feladat a reflektált jel detektálása és időkésleltetésének mérése. A visszavert ultrahangjel érthető módon jelentősen kisebb a kibocsátott jelnél, ezért azt erősítenünk kell, hogy egy komparátorral érzékelni tudjuk a jelenlétét. Erre az erősítésre már egyetlen, különbségképző erősítőként használt műveleti erősítő is alkalmazható.
Különbségképző erősítő
A különbségképző erősítőre a 3. ábra mutat egy lehetséges megoldást. Ez a műveleti erősítős áramkör a két bemeneti kapcsa közé csatlakoztatott ultrahangos vevő feszültségét erősíti. A közös módusú zaj csökkentése érdekében a műveleti erősítő két bemenetének árama közötti különbséget az R1 és R4, valamint az R1 és R3 ellenállások megfelelő megválasztásával érdemes csökkenteni.
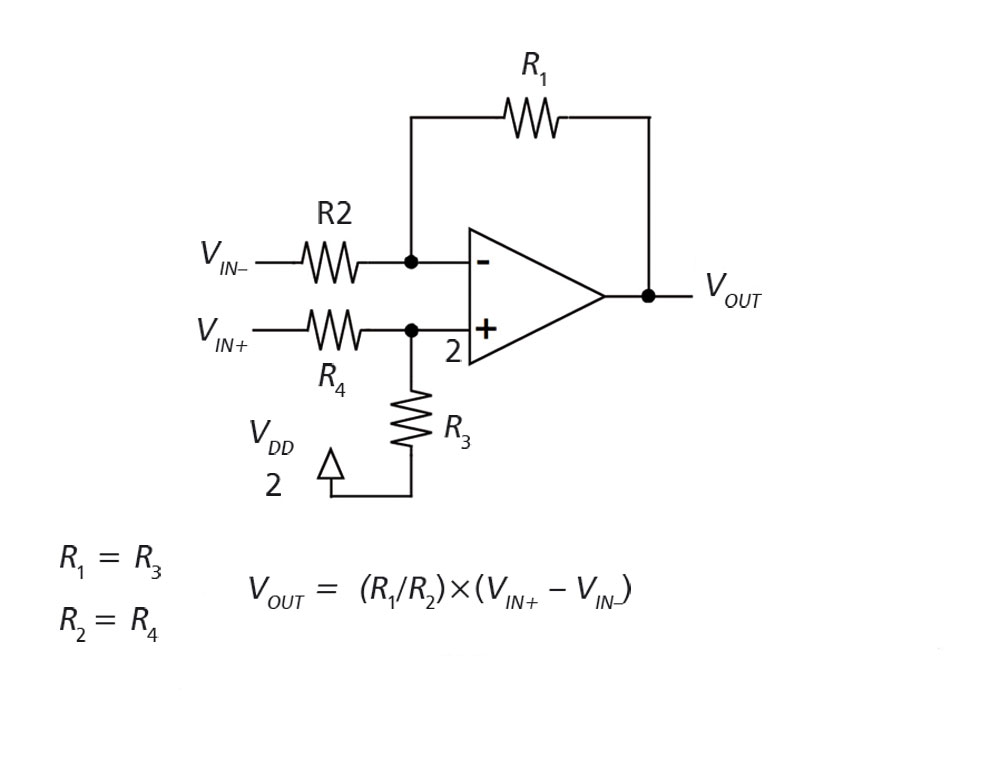
3. ábra A különbségképző erősítő kapcsolása
Az ultrahang vevőkristály úgy működik, mint egy nagy jósági tényezőjű szűrő. A szűrőn átjutó jelet erősíti a különbségképző erősítő. Az első műveleti erősítő erősíti a jelet, és elnyomja a jelre szuperponált közös módusú zajt.
Minden további műveleti erősítővel a megmaradó zajt is erősítenénk, ez pedig további szűrők beépítését tenné szükségessé. Ha azonban megfelelő típusú műveleti erősítőt választunk az ultrahangvevőre közvetlenül csatlakozó erősítőfokozathoz, az minden további erősítőfokozat és szűrő beépítését szükségtelenné teszi.
A bemutatott áramkörben Microchip MCP6022 műveleti erősítőt használtunk, amelynek az egységnyi erősítéshez tartozó sávszélessége (Unity Gain Bandwidth – UGBW) 10 MHz. A nagy UGBW-érték azt jelenti, hogy az erősítő erősítési tényezője lesz magasabb a kiválasztott 40 KHz-es frekvencián. A mintaáramkör erősítése például 40 kHz-en 250…300-szoros, mivel itt az erősítést nem az R1/R2 hányados, hanem az UGBW korlátozza. Az erősített jel továbbfeldolgozását az MCU-ba beépített komparátor végzi. Az ehhez hasonló megoldásokat gyakran használják az adatátvitelben. A komparátor az ultrahangvevőnek a műveleti erősítő által felerősített kimeneti jelét hasonlítja össze egy V_th küszöbfeszültséggel, amint az a 4. ábrán is látható. A küszöbfeszültséget valamivel az érzékelő erősített kimeneti feszültségének (V_US) átlagértéke alá kell beállítani.
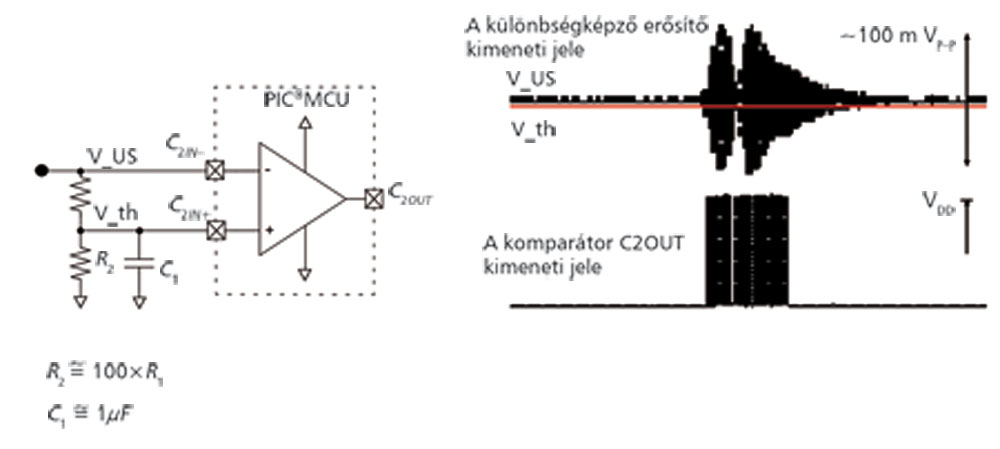
4. ábra Az adatkomparátor
Amikor az erősítő kimenetén megjelenik az ultrahang-érzékelő felerősített feszültsége, a C2IN- csatlakozópont feszültsége a C2IN+ feszültsége alá csökken, amelynek hatására a komparátorkimenet „magas” értékre kapcsol. Az R2 értékének sokkal nagyobbnak kell lennie az R1-énél, de annyira nagynak azért nem szabad lennie,, hogy a komparátor az erősített jelben található zajra is átkapcsoljon. Ideális, ha az R1 úgy van beállítva, hogy a küszöbfeszültség épphogy csak meghaladja az ultrahangvevő kimeneti feszültségének zaját. Minél közelebb sikerül a köszöbfeszültséget beállítani a vett jelhez, annál nagyobb lesz a vevő által áthidalható távolság.
Az utrahang-vevőrendszer komparátorfokozatának működését a PIC-MCU C2OUT-csatlakozópontjával lehet vizsgálni. Tipikus probléma, hogy a komparátor küszöbfeszültsége nincs helyesen beállítva. Ha ez túl alacsony, a távolságmérő lehetőségeit nem használjuk ki, a mérhető maximális távolság kisebb. Ha viszont a küszöbfeszültség túl magas, a komparátor a nagyobb amplitúdójú zajbeütésekre is átkapcsol, lehetetlenné téve a hasznos reflektált jel megkülönböztetését a zajoktól.
A Timer1 kapufunkciója használható a 16 bites Timer1-számláló órajelének engedélyezésére. Ezt a kapufunkciót a komparátor kimenete (a C2OUT-on is mérhető jel) az MCU belső összeköttetésén keresztül vezérelhető. A számlálás addig van engedélyezve, amíg a C2OUT-jel alacsony szinten áll. Ha a vevőérzékelőt egy visszavert ultrahangjel éri el, a C2OUT magas értékre kapcsolódik, és ez leállítja a számlálást. A Timer1 regiszterben ekkor tárolt érték azt fejezi ki, hogy az ultrahangjel kibocsátásától a reflektált jel visszaérkezéséig az órajel periódusidejének hányszorosa telt el – tehát ezt az értéket az órajel ismert periódusidejével megszorozva a terjedési idő értékét kapjuk. Mivel ez idő alatt az ultrahangjel kétszer teszi meg a mérni kívánt távolságot, a terjedési időt kettővel el kell osztani (ezt a számlálóban tárolt bináris érték egy bitnyi jobbra eltolásával igen egyszerűen és gyorsan megvalósíthatjuk), majd a hangsebesség értékével meg kell szorozni. A mérőrendszer felbontását a vivőfrekvencia hullámhossza határozza meg. A példánkban használt 40 kHz-es frekvencián ez a hullámhossz 0,85 cm. Magasabb vivőfrekvenciát választva nő a felbontás, élesebben irányítottá válik az ultrahang-hullámnyaláb, azonban csökken a hatótávolság. A felbontást ezenkívül a jel terjedési idejét mérő számláló órajelének pontossága is befolyásolja, valamint az a jelkésleltetés is, amelyet a zaj elnyomására használt, összetettebb szűrők okoznak. Mindezt figyelembe véve egy 40 kHz-en működő ultrahangos távolságmérő felbontására 1 cm körüli érték adódik, amely a mért távolságtól független – egyedül csak attól függ, hogy egyáltalán képes-e visszavert jelet észlelni az ultrahang-vevőérzékelő.
Ha a maximális mérhető távolságot növelni akarjuk, két módszer közül választhatunk. Megnövelhetjük az adóteljesítményt vagy a vevő érzékenységét. A cikk alapjául szolgáló áramkörökben az ultrahang-adókristályt a mikrovezérlő I/O csatlakozópontjaival vezéreltük, amelyekkel 5 V-os vezérlőfeszültséget és 20 mA-es meghajtóáramot[3] állíthatunk elő. MOSFET-es meghajtókat használva egyaránt megnövelhető a meghajtóáram és a feszültség is.
Ezenkívül a vevő 40 kHz-en mérhető érzékenysége is meghatározza, milyen kicsiny az a jel, amit a komparátor detektálni képes. A mintaáramkörben mindössze egyetlen – műveleti erősítőből felépített – különbségképző erősítőt használunk erre a célra. Emiatt külön szűrésre sincs szükség. Többfokozatú erősítőknél azonban – a zajérzékenység csökkentése érdekében – már valamilyen szűrőfokozatot is be kell építeni a bemeneti különbségképző erősítő és a komparátor bemenete közé. A egyfokozatú erősítőnél elegendő a küszöbfeszültség gondos beállítása is ahhoz, hogy az egyáltalán érzékelhető legkisebb jelet is helyesen detektálhassa a vevő.
Ha az adót és a vevőt külön piezokristállyal valósítjuk meg, gondoskodni kell azok egyirányú beépítéséről. Nem hagyhatjuk figyelmen kívül azt sem, hogy az adó által kisugárzott ultrahangjelek és az azt követő csillapodó rezgések is a NyÁK-lemezen és a közös mechanikai befoglaló rendszeren át (akusztikus úton) „átszivárognak” a vevőáramkörbe. Ha a két kristály között nagyobb távolságot tartunk, esetleg célszerűen kialakított kivágásokat alkalmazunk a NyÁK-lemezen, ez az áthallás csökkenthető. Szokásos megoldás még az ultrahang-jelátalakítók befoglalása rugalmas, akusztikusan csillapító hatású anyagba (gumiba vagy szilikongumiba) annak érdekében, hogy csökkentsük az ultrahang áthallását a befoglaló mechanika elemein keresztül.
Összefoglalás
Az ultrahangos távolságmérés megvalósításához példánkban a Microchip PIC16F690 mikrovezérlőjét és MCP6022 műveleti erősítőjét, valamint a MuRata MA40S4R/S ultrahangos átalakítóit használtuk. A PIC-mikrovezérlő két I/O-csatlakozópontját felhasználva elegendő meghajtóteljesítményt kaptunk utrahangimpulzusok előállításához. Az MCU beépített Timer0 és Timer1 időzítőit használtuk fel az adó 40 kHz-es vivőjelének frekvenciabeállítására, valamint a visszavert jel időkésleltetésének mérésére. Az MCP6022 műveleti erősítővel erősítettük a vevőkristályon mérhető jeleket, és a PIC16F690 MCU beépített komparátorával detektáltuk a visszavert jelimpulzusok jelenlétét.
Szerző: Keith Curtis – Microchip Technology, Inc.
[1] A szerző itt egy szokásosan felületes szóhasználatot enged meg magának. Piezoelektromos jelenségnek szigorúbban véve azt nevezzük, amikor bizonyos kristályokon a rájuk gyakorolt mechanikai feszültség hatására elektromos feszültség lép fel. Ennek a jelenségnek a fordítottja az elektrostrikció, az a jelenség, amikor a megfelelő kristályokra kapcsolt elektromos feszültség hatására azok alakja megváltozik. Ez utóbbi jelenséget hasznosítják az ultrahangos adókristályoknál. A jelenség megfordíthatósága miatt gyakran ugyanazt a szerkezeti elemet használják adóként és vevőként, ezért gyakran a közismertebb „piezoelektromos kristály” vagy rövidebben „piezokristály” nevet használjuk akkor is, ha adáskor éppen az ellentétes fizikai folyamatot, az elektrostrikciót hasznosítjuk. – A ford. megj.
[2] ECCP (Enhanced Capture, Compare and PWM): a digitális jelsorozatok rögzítésére, megadott mintával való összehasonlítására és impulzusszélesség-modulátor alkalmazásokra kifejlesztett, több PIC-MCU-sorozatban megtalálható céláramkör. ‑ A ford. megj.
[3] A cikkben nem kap kellő hangsúlyt, miért szükséges egyáltalán a terhelőárammal számolni egy szigetelő anyagú kristályra felvitt elektródapár meghajtásakor, hiszen az eletrostrikció jelensége (az ultrahang-adókristály mechanikai deformációja) akkor is bekövetkezik, ha csak statikus töltéskülönbséget létesítünk az elektródák között. Ekkor – az állandósult állapot kialakulása után – gyakorlatilag valóban nem folyik terhelőáram. Ha azonban a kristály gerjesztését folyamatosan (a példában 40 kHz-es frekvenciával), nagy amplitúdóval változtatjuk, az elektródák közötti – folytonosan ismétlődő – töltésátrendeződés egy nulla középértékű, de számottevő csúcs- és effektív értékű terhelőáramot eredményez. A mikrovezérlő kimenete limitáljaa csúcsáramot , ezen keresztül pedig az adóteljesítmény értéke is korlátozott. – A szerk. megj.
www.microchip.com
Még több Microchip
Címkék: ultrahang | távolságmérés














