



Hely- és költségkímélő, elemről táplált alkalmazás
 Analóg funkciókkal jól felszerelt „kis” MCU-val
Analóg funkciókkal jól felszerelt „kis” MCU-val
A szenzor az, ahol a való világról alkotott digitális képünk adatai keletkeznek. Mivel a legkülönbözőbb fizikai jellemzőket kell adattá konvertálni, a tervezők már hozzászoktak, hogy ehhez alkalmazásfüggő analóg „köztes elektronikát” is fejleszteniük kell, aminek a minőségén ráadásul az adatok valós értéke áll vagy bukik. A szerző egy mozgásszenzor alkalmazási példáján mutatja be, hogyan lehet ezt az analóg frontendet „beköltöztetni” egy alkalmasan megválasztott mikrovezérlő tokozatába.
A biztonságtechnikai és vezetékmentes elektromedikai megfigyelőrendszerek és hasonlók fejlesztése során a siker jó néhány tényezőtől függ, azonban ezek között is a fontossági sorrend elejére kerül a terv összetettsége és energiahatékonysága, ha teleptáplálású és kommunikáló, „kapcsolt” alkalmazást tervezünk. Ennek fő oka az, hogy minél hosszabb elemélettartamot várunk el a végterméktől, annál alacsonyabb energiafelvétellel kell megoldani a feladatot. Ahhoz, hogy a tervező minél jobban megközelíthesse az ilyen alkalmazások alacsony energiaszükségletére vonatkozó követelményt, ráadásul úgy, hogy a végtermék megbízható és hosszú élettartamú legyen, először is kicsi és energiahatékony mikrovezérlőt (MCU-t) kell választania okos és fejlett beépített képességekkel és funkcionalitásokkal. Az ilyen MCU-k képesek az alkalmazás által megkívánt feladatok többségének ellátására, csökkentve ezzel az igényt a külső passzív alkatrészekre az érzékelőfunkciót megvalósító hálózati végpontokban, ráadásul a flexibilitás további növekedését alacsony teljesítményfelvétel árán és egyszerűen teszik lehetővé.
Ha például egy elemről táplált szenzorvégpontot tervezünk olyan alkalmazásra, mint egy lakóhely biztonsági rendszere, gyakran passzív infravörös (Passive Infrared – PIR) mozgásérzékelőket helyezünk el a lakáson belül és kívül. A PIR-érzékelő észleli az érzékelőelem által „látott” infravörös sugárzás mennyiségét, amely a hőmérséklettől és a szenzor elé kerülő tárgy felületének jellemzőitől függ. Ha a szenzor és a háttér közti térbe egy személy lép be, az érzékelő észleli a változást a környezeti hőmérsékletről a behatoló testhőmérsékletére és vissza. A PIR-szenzor a beérkező infravörös sugárzásnak ezt a változását a kimenőfeszültségének megváltozásává alakítja át [VPIR(t)]. Más tárgyak, amelyeknek a hőmérséklete azonos a háttérhőmérséklettel, de felületi tulajdonságaik eltérőek, ugyancsak változást okoznak a szenzor által érzékelt emisszió mintázatában, amint azt az 1. ábra is mutatja.
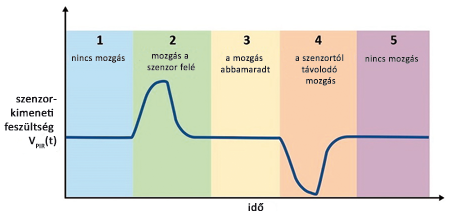
1. ábra A PIR-szenzorok mozgásérzékelésének elve
Egy PIR-érzékelő kimeneti jele rendszerint nagyon kicsi, jellemzően kisebb 1 mV-nál. Annak érdekében, hogy már érzékeljük a mozgást, ugyanakkor még elkerüljük a hamis detektálást, az analóg jelet fel kell erősíteni, mielőtt azt egy analóg-digitális átalakító (Analog-to-Digital Converter – ADC) segítségével mintavételeznénk. A tipikus PIR-megoldásoknál ezt néhány nagy erősítésű műveleti erősítőfokozattal érik el, amely viszont növeli a rendszer bonyolultságát, az alkatrészek számát, az energiafelvételt, a költséget és egyebeket. A továbbiakban azzal foglalkozunk, hogyan lehet ezeket a kellemetlen hatásokat csökkenteni egy kis méretű és energiahatékony MCU felhasználásával.
A felépítés bonyolultsága
Egy kis méretű és nem túl igényes, de alkalmas képességválasztékkal, például 12 bites, differenciális bemenetű ADC-vel és PGA-val (Programmable Gain Amplifier – programozható erősítő) rendelkező mikrovezérlő választásával csökkenthető a szükséges külső alkatrészek száma, az elfoglalt NyÁK-felület és az anyagköltség. Vegyük példának a MickroE cég PIR Click típusú mozgásérzékelőjét. Ez egy NyÁK-hordozó, amely az összes passzív alkatrészt is tartalmazza egy működő PIR-végpont felépítéséhez. A bepattintható NyÁK-lemezre egy műveleti erősítőkből álló jelerősítőt, AD-konvertert, ellenállásokat és kondenzátorokat építettek rá azzal a céllal, hogy könnyű prototípusfejlesztéshez vagy termékértékeléshez készen felhasználható legyen. Egy egyszerű prototípusfejlesztésre alkalmas tipikus összeállítás lehet például, ha a PIR Click kártyát a Microchip Curiosity Nano Base for Click boards™ és a Curiosity Nano Evaluation Kit termékekkel együtt használjuk. Egy PIR-alapú szenzorvégpont megoldásában ezzel kihasználhatók egy olyan mikrovezérlő előnyei, mint a Microchip Technology ATtiny1627, amelynek része egy 12 bit felbontású, differenciális bemenetű AD-átalakító és egy PGA is. A szükséges külső alkatrészek száma jelentősen csökkenthető, ha kiküszöböljük a jelerősítésre használt külön beépített műveleti erősítőket. Ezen a módon – valamint a külső ADC elhagyásával – néhány további passzív alkatrész, például néhány ellenállás és kondenzátor is feleslegessé válik.
Ezáltal – csupán egyetlen ilyen alkalmasan választott mikrovezérlő használata révén – a PIR Click NyÁK-területe jelentősen csökkenthető. A 2. ábrán a piros „X” jelek mutatják, mely alkatrészeket lehet elhagyni, és kék vonalak jelölik, milyen új kapcsolatokat kell létrehozni.
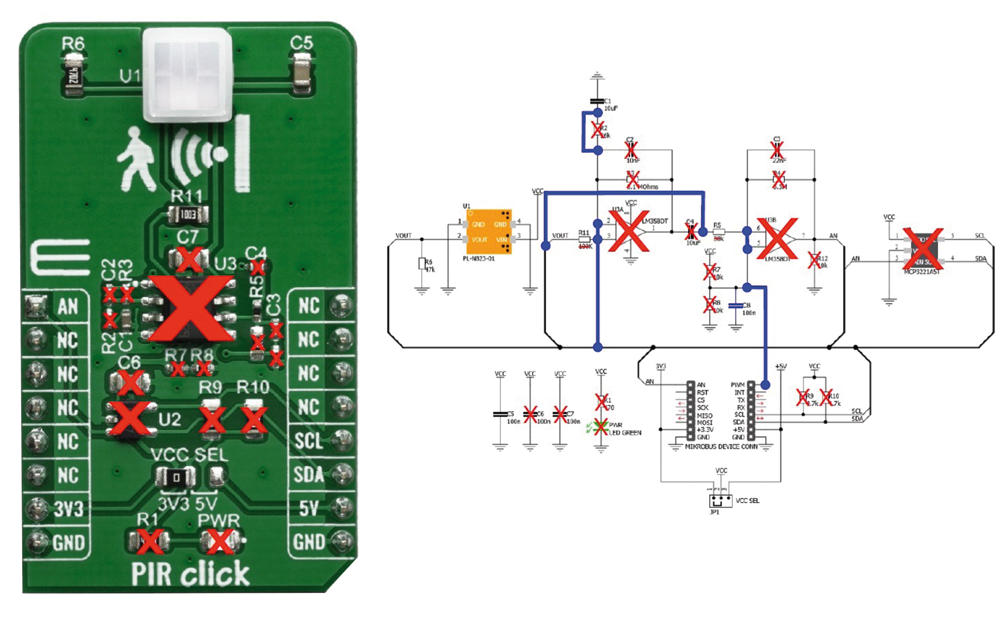
2. ábra A példában szereplő módosítások a PIR Click kártyán és annak elvi kapcsolási rajzán
Megjegyzés
Ebben a példában a PIR Click terméket csupán azért használtuk a változtatások alapjául, mert ez kényelmesebb volt, mint új NyÁK-ot tervezni és beszerezni a szükséges alkatrészeket. Ez a módosított megoldás nem kíván fellépni azzal az igénnyel, hogy az eredeti Click kártyának versenytársa legyen.
Ezekkel a módosításokkal, amelyek teljes mértékben kihasználják a beépített, 12 bites, differenciális bemenetű ADC és a PGA előnyeit, a 3. ábrán mutatjuk, milyen kevés külső alkatrészre van szükség, ha a célnak megfelelő mikrovezérlőt választunk.
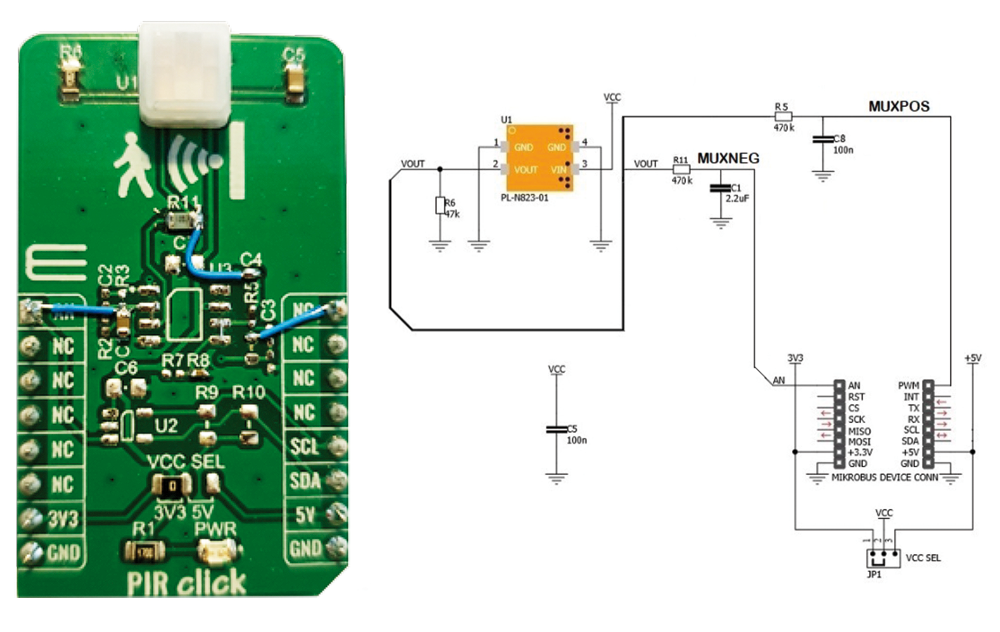
3. ábra A módosított PIR Click és annak elvi kapcsolási rajza
A kevesebb külső alkatrésszel a hardver és a NyÁK-terv áttekinthetőbb és kisebb, továbbá kevesebb hardvermegfontolással kell foglalkozni a külső alkatrészek elhelyezésével kapcsolatban. Ráadásul a szoftver és a firmware annál tömörebb és hatékonyabb lehet, minél több részfeladatot oldunk meg ugyanazon a mikrovezérlőn belül. Az időzítés és szinkronizáció feladatait is simábban lehet kezelni.
Azzal, hogy a szenzorvégpont áramköri tervének számos bonyolult részletét „költöztetjük be” a hardverből a mikrokontrollerbe, hogy azokat a továbbiakban firmware-szerűen kezelje és/vagy valósítsa meg a központi feldolgozóegység (Central Processing Unit – CPU), a megoldás rugalmasabban kezeli a fejlesztési folyamat során szükségessé váló változtatásokat és a kiegészítést újabb funkcionalitásokkal – és mindezt anélkül, hogy a NyÁK újratervezésére kellene vesztegetnünk az időt. Ezáltal jelentős mennyiségű fejlesztési időt és költséget takarítunk meg. Ugyancsak kényelmesebbé válik az egyéb szempontok (például az energiafogyasztás csökkentése) miatt szükséges kódoptimalizálás is. A tervező számára egyszerű paraméterváltoztatásokkal válik lehetségessé az alkalmazáskód megváltoztatása akár új funkcionalitások beépítése, akár a kódoptimalizálás érdekében. A kód finomítását akár az energiafogyasztás csökkentése, akár az érzékenységnek a környezeti feltételekhez való igazítása is szükségessé teheti. Ez utóbbi például akkor fordulhat elő, ha a környezeti hőmérséklet változása miatt nehézségekbe ütközhet egy emberi lény érzékelése 30 °C feletti környezeti hőmérsékletnél.
További példa lehet egy új funkcionalitás beépítése, amely gépitanuló-algoritmussal javítja a mozgásminták felismerését, és megtanítja a rendszert arra, hogyan különítse el a hasznos információt az egyszerű zajtól, vagy egy ember mozgását egy állatétól és így tovább.
A PIR-érzékelőn és egy ATtiny1627-hez hasonló mikrokontrolleren alapuló mozgásérzékelő-alkalmazások bonyolultsága a hardverből áthelyezhető a szoftver és a firmware területére a mikrokontrollerbe beépített funkcionalitások sokaságára támaszkodva. Ezáltal a bonyolultság csökken, miközben a konstrukció flexibilisebbé válik.
Energiahatékonyság
Az energiafogyasztás egy vezetékmentes érzékelő kulcsfontosságú tulajdonsága. Ennek oka, hogy minél hosszabb az elem hasznos üzemi élettartama, annál hosszabb az érzékelő végponté, következésképpen az egész hálózaté is. Ez minden vezetékmentes szenzorhálózatra igaz. Ha több tíz, száz vagy ezer szenzort telepítünk, amelyek ráadásul különféle típusú felügyeletet igényelnek, egy kikapcsolt szenzorvégpont könnyen juthat arra a sorsra, hogy halottnak vagy működésképtelennek minősítse a felügyelet. Nagyobb érzékelőrendszereknél az elemnek vagy magának a szenzornak a cseréje többletköltséget jelent a végfelhasználónak, azonkívül is, hogy a rendszer le is állhat, vagy veszíthet a funkcionalitásaiból a nem működő végpont miatt – egyszóval előzetes figyelmeztetés nélkül is előfordulhatnak nem kívánt események. Következésképpen minél tovább kitart a végpontot energiával ellátó elem, annál jobb.
A mikrovezérlő alvó üzemmódjait és rövid felébredési idejét kihasználva megoldható, hogy minden érzékelő végpont a lehető legkisebb energiafogyasztással működhessen. A végpont alvó üzemmódban tartható, majd felébreszthető, ha mozgásra utaló jelre lehet következtetni a szenzor érzékelési tartományán belüli hőmérséklet-változásból. Ezután az MCU feldolgozza a jelet, majd visszatér az alvó üzemmódba, amely révén minden hasonló megoldású, elemről táplált végpont üzemi élettartama megnövekszik anélkül, hogy elemcseréről kellene gondoskodni. A 4. ábrán látható, hogyan működik az a CPU, amely kihasználja az alvó üzemmódban és a gyors felébreszthetőségben rejlő előnyöket. A fogyasztás mértéke függ az alkalmazástól és a PIR-érzékelő konfigurációjától, a mintavételi időközöktől, valamint a szűrési paraméterektől, amelyek a mozgásérzékelés távolságtartományára és a szenzor érzékenységére is hatással vannak. Fordítsunk figyelmet ezen paraméterek célszerű beállítására annak érdekében, hogy tovább csökkenthessük az energiafogyasztást az olyan időszakokban is, amikor alacsonyabbak az alkalmazással szembeni követelmények.

4. ábra A firmware időzítési diagramja
Összefoglalás
Azáltal, hogy olyan okos és kifinomult beépített képességekkel és funkcionalitásokkal vannak felruházva, amelyek alkalmasak az áramfelvétel csökkentésére és az energiahatékonyság növelésére, az olyan kis helyigényű és hatékony mikrokontrollerek, mint az ATtiny1627 is, képesek megnövelni az elemről táplált és kommunikációra képes alkalmazások élettartamát, miközben csökkentik a megoldás bonyolultságát, a teljes rendszerköltséget és a piacképes termék előállításának idejét. Amennyiben az olvasó mélyebben érdeklődik a kis fogyasztású és költséghatékony PIR-mozgásérzékelő alkalmazások iránt, keresse fel a Microchip honlapját.
Szerző: Stian Sogstad, alkalmazástechnikai mérnök – 8 bites MCU-k, Microchip Technology
www.microchip.com
#ee2e2b














