



Állapotalapú karbantartás
 A frekvenciaváltókat több mint fél évszázada használják különféle alkalmazások esetén. A technológiai folyamatok szabályozása mellett az egyik fő előnye az energiafelhasználás csökkentése. Az Ipar 4.0 fejlődésével a frekvenciaváltó az egyszerű végrehajtó szervből továbbfejlődött, és az automatizálási rendszer intelligens elemévé vált. Az a lehetőség, hogy a készüléket ne csupán a motor hajtására, hanem okosérzékelőként is használjuk, adja az ötletet, hogy használjuk ki az állapotalapú karbantartásra vonatkozó tulajdonságait is.
A frekvenciaváltókat több mint fél évszázada használják különféle alkalmazások esetén. A technológiai folyamatok szabályozása mellett az egyik fő előnye az energiafelhasználás csökkentése. Az Ipar 4.0 fejlődésével a frekvenciaváltó az egyszerű végrehajtó szervből továbbfejlődött, és az automatizálási rendszer intelligens elemévé vált. Az a lehetőség, hogy a készüléket ne csupán a motor hajtására, hanem okosérzékelőként is használjuk, adja az ötletet, hogy használjuk ki az állapotalapú karbantartásra vonatkozó tulajdonságait is.
Ipar 4.0 a motoros hajtásrendszerek esetén
A 4. ipari forradalom kínálja a lehetőséget, hogy az emberek, a rendszerek és a telepített berendezések intelligens módon történő összekapcsolása révén felhasználjuk a kínálkozó előnyöket. A klasszikus automatizálási piramis átalakul hálózatba kötött, egymással kommunikálni képes alrendszerek hálózatává, amelyben a frekvenciaváltók, a motorok, érzékelők és beavatkozó szervek egyaránt csatlakoznak a felhőbe (1. ábra).
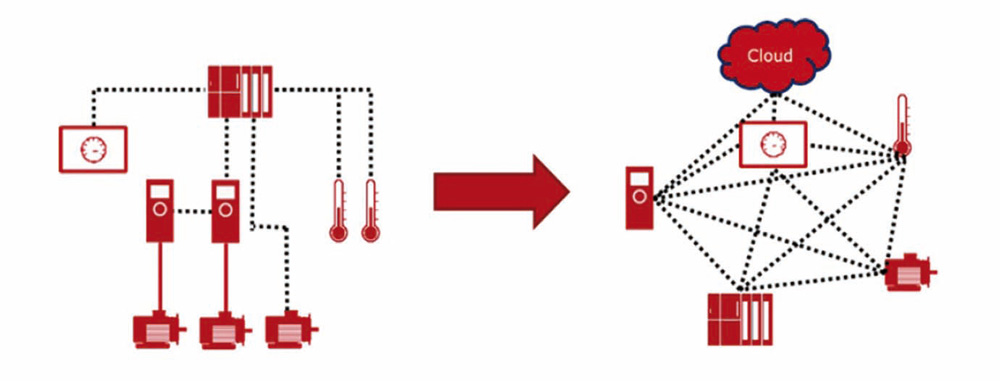
1. ábra A frekvenciaváltók, motorok, érzékelők és beavatkozó szervek csatlakoznak a felhőbe
A frekvenciaváltó mint érzékelő
A frekvenciaváltóban lévő mikroprocesszor, a buszos kommunikáció és a feszültség- és áramérzékelők új lehetőségeket nyitnak. Ezenfelül további érzékelők kapcsolhatók a készülékekhez, szinte minimális költségekkel. Mindezekkel együtt a frekvenciaváltót okosérzékelőként lehet használni. Az elérhető információk alapján lehetővé válik például a rendszer optimalizálása, az energiahatékonyság optimalizálása, vagy akár az állapotalapú karbantartás megvalósítása (2. ábra).

2. ábra A frekvenciaváltó mint okosérzékelő
A beágyazott állapotalapú megfigyelés
A beágyazott állapotalapú megfigyelés a rendszer működése során figyelemmel tudja kísérni a rendszer állapotát. Ennek érdekében ki kell választani a megfigyelendő paramétereket – mint állapotjelző indikátorokat. Az állapotalapú karbantartás szükségességének jelzése azon alapul, hogy a hiba bekövetkeztének valószínűsége a rendszer elhasználódásával növekszik. Ezt illusztrálja a 3. ábrán látható P-F görbe a jellegzetes pontjaival. Ahhoz, hogy az állapotromlást érzékelni lehessen, a kezdeti jó állapotról valamilyen mértékű romlásra van szükség. Ez az ábrán a „Potential failure” pont. A másik jellegzetes pont a „Functional failure”, amelynél a berendezés állapota már nem felel meg az elvárt követelményeknek (3. ábra).

3. ábra A megelőző karbantartás szükségességének jelzése
Mechanikai jelenségek
Számos hiba, például csapágy-elhasználódás, vagy különböző aszimmetriák különböző mértékű és irányú rezgéseket okoznak. A forgó gépek rezgésmérésének külön művészete van. Talán a legszélesebb körben használt módszer a rezgés jelének RMS értékéből történő következtetés. Változó fordulatszámú hajtások esetén ez nem is olyan egyszerű, mivel a rezgés mértéke összefüggésben van a fordulatszámmal. Gyakran a hibaérzékelési korlátokat a legrosszabb esetekhez állítják be, hogy elkerüljék a téves leoldásokat. Ez azonban csökkenti az érzékelés hatékonyságát azokban a tartományokban, ahol a működés során nincs jelen rezonancia.
Amennyiben a rezgésérzékelő jelét a frekvenciaváltó fogadja, akkor lehetővé válik az érzékelő jelének és a hajtás egyéb jellemzőinek (pl.: fordulatszám, vagy más, az alkalmazáshoz kapcsolódó jel) korrelációs figyelése. A frekvenciaváltó ezzel a megoldással a 3. ábrának megfelelően előre tudja jelezni a rendszer elhasználódását, így váratlan leállás helyett időben fel lehet készülni a szükséges karbantartásra.
A funkció megfelelő működéséhez szükség van egy kezdeti tanulási időszakra, amelynek során a készülék begyűjti a megfelelő rendszer rezgésjellemzőit, majd pedig a további üzem során ezekhez viszonyít. A 4. ábrán a rezgésértékek a fordulatszám függvényében láthatók. A fekete görbe a jó, míg az elszórt zöld a hibás rendszerállapotot jelzi (4. ábra).
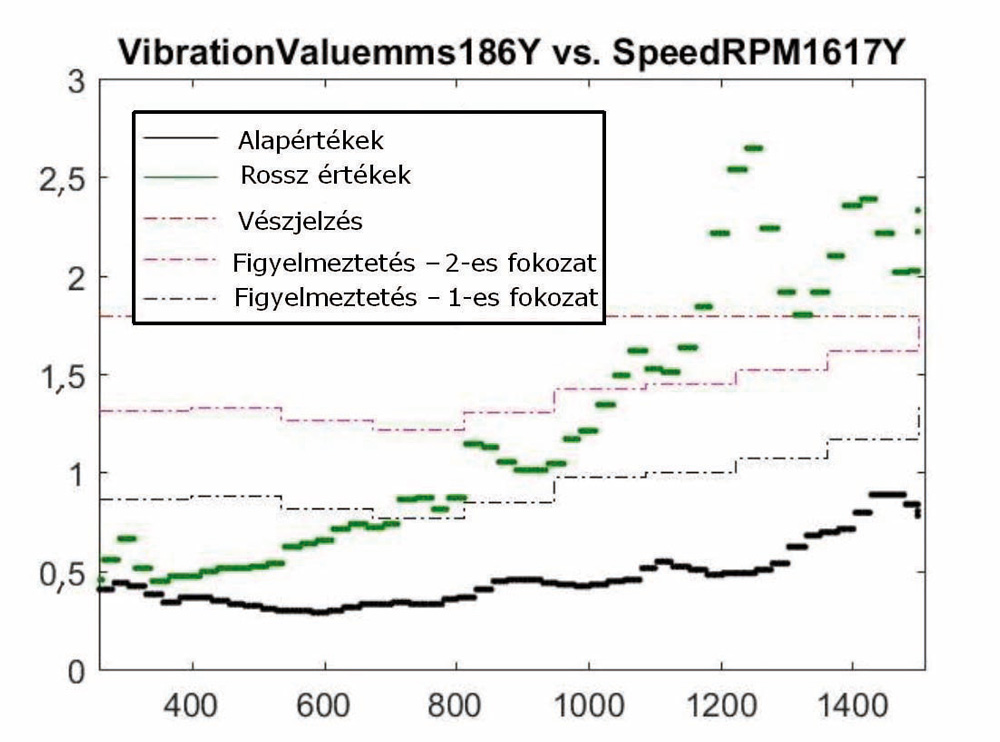
4. ábra Az érzékelő jelének korrelációs figyelése
Elektromos jellemzők
A motor és a hajtott berendezés állapotára a motor által felvett áramalakból és annak az elhasználódás következtében történő változásából lehet következtetni. A mai frekvenciaváltók processzorai által biztosított számítási teljesítmény és memória elegendő arra, hogy ezt önállóan, külső berendezés nélkül elvégezzék – a motor hajtásával párhuzamosan. Mivel a megfigyelést a frekvenciaváltó a saját áramváltóival végzi, ezért nincs szükség külön érzékelőkre. A hajtás képes korrelálni a mért áramalakokat, illetve az abból kinyerhető spektrumot egyéb belső információkkal.

5. ábra Túl-, illetve alulterheltség érzékelése a frekvencia függvényében
Alkalmazási szempontok
Egy szivattyú esetében a motorra jutó feszültségből és az általa felvett áramból különböző, a terhelésre utaló jellemzőt lehet kiszámolni. Ilyen például a motor teljesítménye, a szükséges energia, valamint a szükséges nyomaték. A frekvenciaváltó a kezdeti tanulási szakasz után ezen változók kezdeti értékeitől való eltérésének és a szivattyú fordulatszámának függvényében képes felismerni a túl-, illetve az alulterheltséget, amelyek különböző szivattyúalkalmazási hibákra utalnak, mint például mechanikai megszorulás, dugulás, törött járókerék, elhasználódás, stb. (5. ábra).
Összegzés
Az állapotalapú megfigyelés kiválóan használható az állapotalapú karbantartás bevezetésére, amely egy evolúciós lépést jelent a rendszer hibái esetén a hiba bekövetkezte utáni karbantartásról a tervezhető, a hiba bekövetkeztét megelőző karbantartás irányába. Mivel a frekvenciaváltók amúgy is szükségesek a motorok fordulatszámának változtatásához, ezért akár további költségek nélkül, vagy minimális költséggel megvalósíthatók a fentiekben leírtak.
Szerző: Toma Gábor – okleveles villamosmérnök, értékesítéstámogatási vezető, alkalmazástechnikai mérnök
Danfoss Kft.
1139 Budapest, Váci út 91.
Tel.: +36 1 450 3566
http://drives.danfoss.hu














