



Kapacitív érintésvezérlés
 Az okostelefonok és a tabletek elterjedése magától értetődővé és megszokottá tette az érintésvezérlést, ami az elektronika egyre több területén készteti a fejlesztőket mechanikus felhasználói interfészek (kapcsolók, nyomógombok) elektronikus változattal való kiváltására, elkerülve a kopásból, anyagfáradásból eredő meghibásodásokat és kihasználva a technológia által nyújtott innovatív gesztusvezérlésben rejlő lehetőségeket.
Az okostelefonok és a tabletek elterjedése magától értetődővé és megszokottá tette az érintésvezérlést, ami az elektronika egyre több területén készteti a fejlesztőket mechanikus felhasználói interfészek (kapcsolók, nyomógombok) elektronikus változattal való kiváltására, elkerülve a kopásból, anyagfáradásból eredő meghibásodásokat és kihasználva a technológia által nyújtott innovatív gesztusvezérlésben rejlő lehetőségeket.
Távirányítókban, háztartási gépekben, kaputelefonokban, szórakoztatóelektronikában mind gyakrabban találkozunk ilyen ember-gép interfész megoldásokkal, amelyek a kapacitív érintésvezérlés-technológia segítségével egyszerűen megvalósíthatók. További előnye ennek a technológiának a készülék számára a környezeti hatásokkal (víz, por stb.) szembeni magasabb ellenállóság, hiszen általában nincs szükség a készülékház megbontására. Cikkünkben áttekintjük a kapacitív érintés- és közelítésérzékelés fizikai alapjait és megvalósítási lehetőségeit.
Általános trend, hogy a mikrokontrollergyártók manapság felruházzák eszközeiket alapszintű érintésvezérlési funkciókkal, amelyek lehetővé teszik – külön áramkörök illesztése nélkül – az egyszerű érintőgombok, alap-gesztusvezérlés integrálását a végtermékbe. Ezek a megoldások általában tökéletesen alkalmasak arra, hogy a mechanikus kapcsolókat, forgógombokat és csúszkákat korszerű kapacitív érintésvezérlésre cserélje a konstruktőr, azonban pontos pozicionálást igénylő feladatokra, illetve extrém elvárások (fán, vastag üvegen keresztüli vezérlés) esetén már erre a célra fejlesztett professzionálisabb megoldások alkalmazása kívánatos. Ilyen „use-case” például a számítógépek vagy távvezérlők érintőpadja, korszerű sütők, konyhai gépek kezelőszervei vagy a bútorba integrált érintőkapcsolók.
Ezekre a feladatokra kiválóan alkalmazható nagy érzékenységű innovatív megoldást nyújt az Azoteq cég, amelynek szabadalmait neves mikrokontroller-gyártók is alkalmazzák.
A kapacitív érzékelés alapjai
A kapacitív szenzorok olyan vezető felületek, amelyek kapacitása az emberi test, kéz vagy ujj közelítésének, érintésének hatására megváltozik. Ez a kapacitás lehet két mérőelektróda közötti kölcsönös kapacitás, vagy egy elektróda és a föld közötti saját kapacitás. A bekövetkező kapacitásváltozás mértéke nagyon kicsi, érintés esetén 10 pF, közvetlen közelség esetén 1 pF, közelítés esetén mindössze 0,05-0,1 pF nagyságrendbe esik, amelynek detektálására vagy egy mikrokontroller A/D konverterét és megfelelő szoftver könyvtárat vagy dedikált érintésvezérlőt használhatunk. Az érzékelésben használt módszerek a következők lehetnek:
-
RC érzékelési elv (RC acquisition principle)
A kapacitás adott ellenáláson keresztüli töltési és kisütési idejének változásán alapul.
-
Töltésátviteli érzékelési elv (Charge transfer acquisition principle)
A szenzorkapacitásban tárolt töltés egy detektáló kondenzátorba való impulzusszerű átvitelén alapuló módszer.
-
ProxSenseTM saját kapacitásmérési elv (Surface ProxSenseTM acquisition principle)
Működési elvét tekintve megegyezik az előző módszerrel, de a teljes érzékelést dedikált hardver végzi, ami különlegesen nagy érzékenység elérését teszi lehetővé.
-
ProxSenseTM kölcsönös kapacitásmérési elv (Projected ProxSenseTM acquisition principle)
A módszer egy meghajtott és egy vevőelektróda közötti kapacitásban tárolt töltés mérésén alapul, amelyet a töltéstranszfer elvéhez hasonlóan itt is mintavételező kondenzátor segítségével detektálunk. A közelítő ujj változtatja az elektródák közötti szigetelés dielektromos állandóját, ezáltal csökkentve köztük a kapacitást. Az eredmény a mintavételező kondenzátor hosszabb töltési ideje (több töltési ciklus,) amely alkalmas az ujj jelenlétének detektálására.
A ProxSenseTM márkanév az Endrich által 2018-től képviselt délafrikai hightech vállalat, az Azoteq (Pty) Ltd tulajdona.
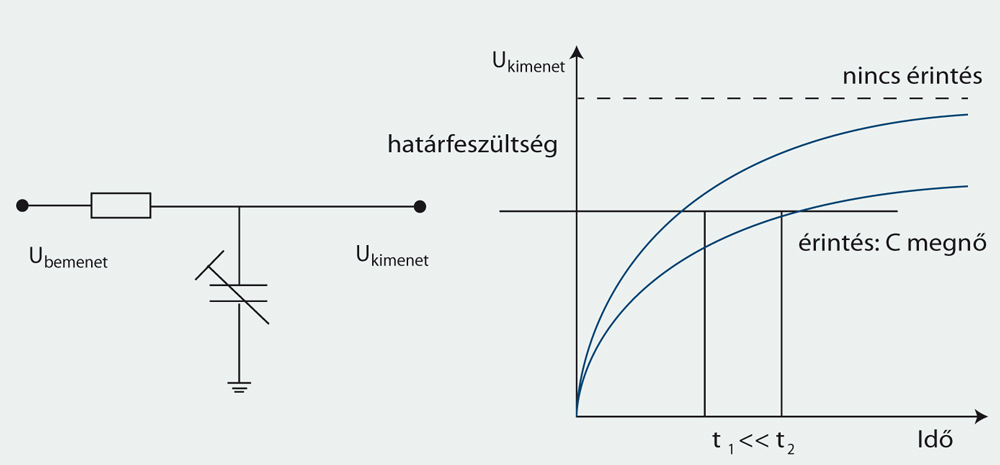
1. ábra
Egyszerű RC elvű érintésérzékelés mikrokontrollerrel
A legegyszerűbb RC elvű érintőgomb-megoldást mikrokontrollerrel és szoftveres időméréssel lehet megvalósítani (1. ábra). Amikor nem érintjük meg az elektródát, akkor annak kapacitása állandó (Cx), az R-C tag beállított határfeszültségre való feltöltődéshez szükséges idő t1. Ujj érintésekor a CT kapacitás párhuzamosan kapcsolódik az elektródakapacitáshoz, így az eredő kapacitásérték kb. 5 pF-dal megemelkedik (C = Cx + CT), a határfeszültség eléréséhez szükséges töltési/kisülési idő t2 lesz. A mérés során a táplálás felfutásakor induló időzítő méri a töltési időt addig, amíg az érzékelőlábon a feszültség elér egy küszöbértéket. A mérés elvégzésére könnyen konfigurálható szoftverkönyvtárak állnak rendelkezésre. Az olcsó és egyszerű felépítés mellett a megoldás csak stabil földelés mellett üzembiztos (2. ábra).

2. ábra
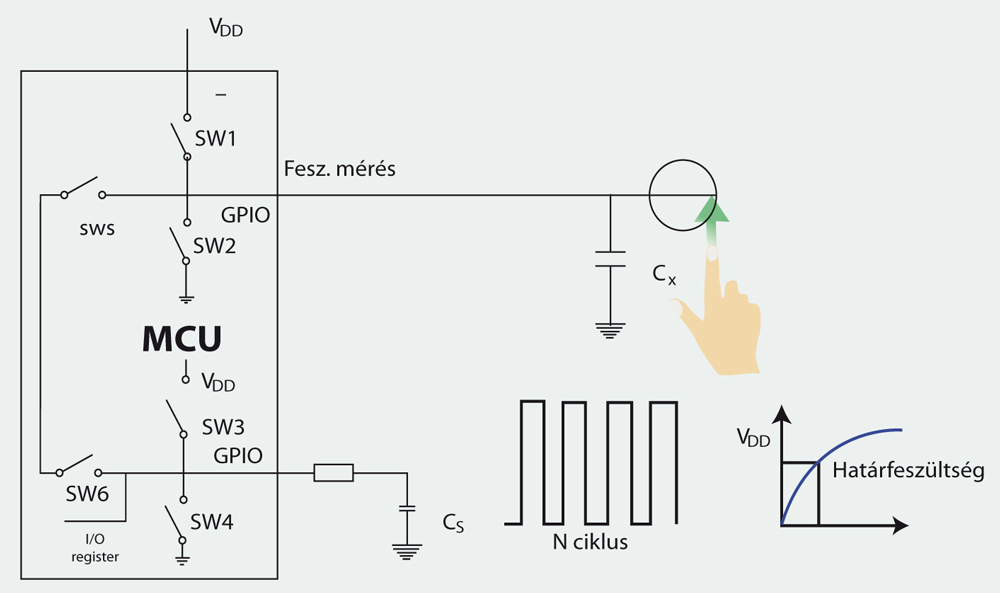
Töltéstranszferelvű érintésérzékelés mikrokontrollerrel
A töltéstranszferelv lényege a 3. ábrán követhető nyomon. A mikrokontroller analóg GPIO lábához kapcsolt érintőelektróda néhány 10 pF kapacitást képvisel (Cx – szenzorkapacitás). Az egyik kijelölt GPIO-hoz egy ennél több nagyságrenddel kisebb mintavételező kondenzátort kapcsolunk (Cs – samplingkapacitás). A Cx kapacitás VDD-re töltődik az SW1 bekapcsolásával, majd az ábrán látható logikai kapcsolók (SW5 és SW6) megfelelő szekvenciával való kapcsolásával töltésének egy része periodikusan átkerül a Cs kondenzátorba, amelynek kimeneti feszültsége – amelyet a GPIO port A/D átalakítóján keresztül a mikrokontroller mér – alapállapotban N ilyen ciklus után éri el a kijelölt határfeszültséget. Amennyiben érintést érzékel a szenzor, annak kapacitása megemelkedik, több töltést tárol, ennek köszönhetően egységidő alatt több töltést is tud átáramoltatni a Cs kondenzátorba, kimeneti feszültsége tehát sokkal hamarabb (n<N alatt) éri el a határfeszültséget. A Cs kondenzátor feszültségét mérve és a töltéstranszferperiódusokat számlálva az érintés a mikrokontrollerrel könnyen detektálható. Az SW1, SW2, SW3 és SW4 logikai kapcsolók a kondenzátorok teljes feltöltését és kisütését végezhetik egy jól definiált alapállapot beállításához, amíg a töltéstranszfert az SW5 és SW6 végzi.
Hasonló elven működnek és egy fokkal magasabb integrálhatóságot biztosítanak a mikrokontrolleres rendszerek számára a kimondottan érintésérzékelési feladatra kifejlesztett célkontrollerek is, mint például a Holtek BS8xx sorozata (4 ábra).
3. ábra
Ezek az eszközök már több olyan funkcióval is rendelkeznek, amelyek nagyobb megbízhatósággal ruházzák fel az alkalmazást nehezebb környezeti feltételek mellett is, minimalizálják az energiafogyasztást és kis külső alkatrészigényű megoldást nyújtanak a host-mikro-konroller számára.
A sorozat fejlettebb tagjai soros kommunikációra is képesek, és dekódolt formában adják vissza az érintőgombok állapotjelzéseit. Ugyanezen az interfészen keresztül az MCU parancsokat is tud küldeni a touch kontroller számára – például kalibrálás során.

4. ábra
Azoteq ProxSenseTM elvű érintésvezérlő kontrollerek
Magyarországon az Azoteq név nem tartozik a széles körben ismert márkanevek közé, bár az általuk 2004 óta folyamatosan fejlesztett kapacitív közelítés- és érintésérzékelő megoldások számos itthon is kapható eszközben megtalálhatók. ProxSenseTM technológiájukat felhasználva a világon a legérzékenyebb érintésvezérlőket kínálják, amelyek képesek akár 100 attofarad (10-16 F) kapacitásváltozás érzékelésére is, miközben a jel-zaj viszony 1000:1. Ez 100 szoros érzékenység és 30 szoros jel-zaj viszony növekedést jelent a korábbi technológiákkal szemben.
Kétszintű érzékelés
Ez a különleges érzékenység az egyszerű érintőkapcsolóknál jóval összetettebb eszközök készítését teszi lehetővé. A legegyszerűbb egycsatornás saját kapacitásérzékelőik is kétlépcsős érzékelésre alkalmasak. Miközben közelítünk az elektródához, először a közelítésérzékelő (Proximity Output Pin) jelez, ami például automatikus megvilágításra használható, majd az érintéskor egy másik kimenet (Touch Output Pin) aktiválódik, amely a kívánt vezérlést végzi. Többcsatornás változatokban a közelítésérzékelés használható a vezérlő vagy akár az egész eszköz kis fogyasztású alvó állapotból való felélesztésére is, mivel az érzékelők programozhatók úgy is, hogy csak a közelítésérzékelő csatorna működjön, csökkentve ezáltal a rendszer fogyasztását.

5. ábra
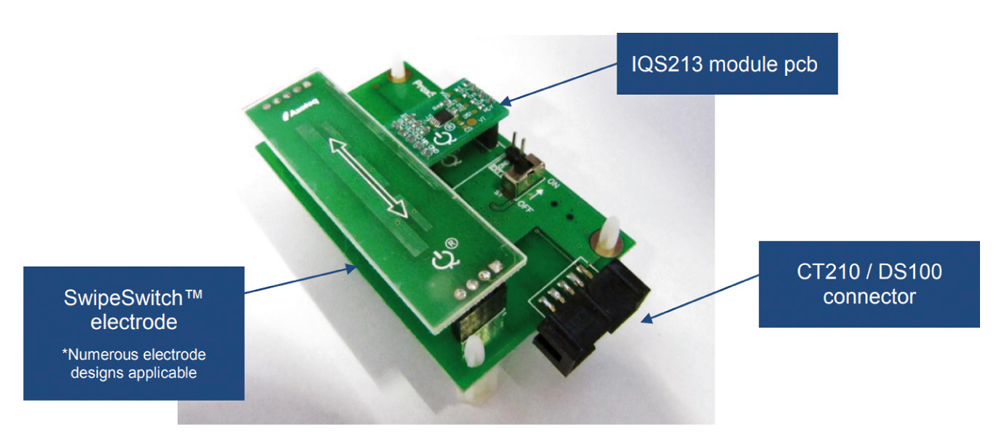
Simítókapcsoló (Swipe Switch)
Három érzékelőelektródát egymás mellé téve egyszerű gesztusvezérlőt tudunk megvalósítani, ami egy adott irányú simítást érzékelve kapcsol. Ez a működés kézben tartott eszközöknél is lehetővé teszi az érintésvezérlés megvalósítását, mivel az egyszerű tartást és a kétirányú simítást képes egymástól megkülönböztetni (5. és 6. ábra).
6.ábra
Kerék és csúszka: folyamatos vezérlés (Wheel and Slider)
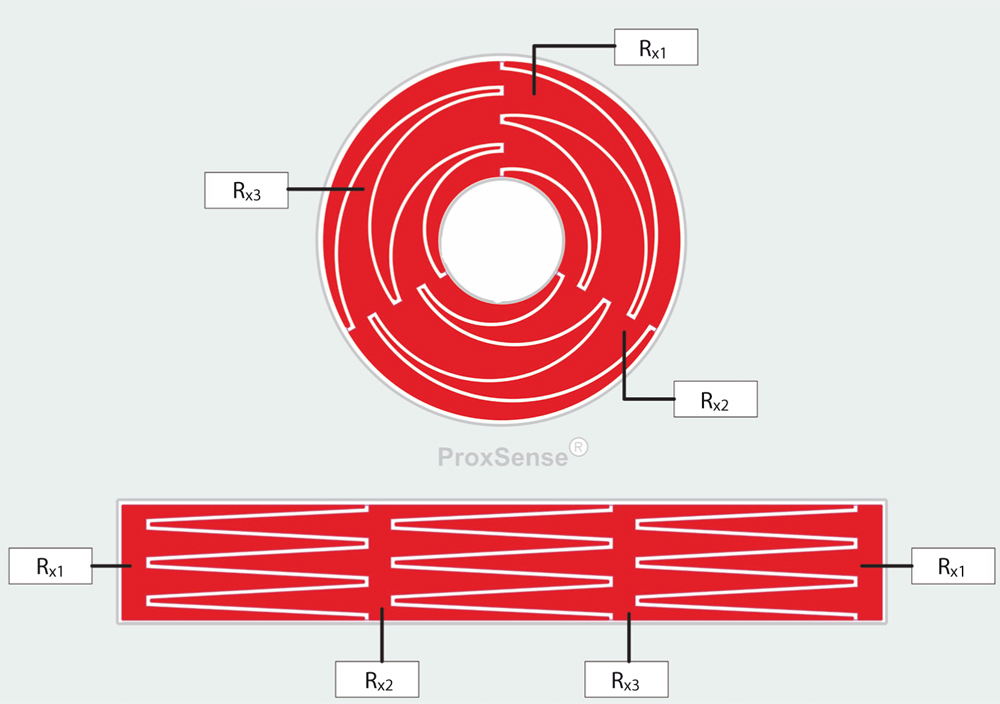
A többcsatornás kapacitásmérésen alapuló ProxSenseTM eszközök a folyamatos vezérlést is lehetővé teszik. Ha az érzékelők az ábrán látható módon helyezkednek el, az elektródákon érzékelt kapacitásváltozások arányából a vezérlőbe integrált mikrokontroller kiszámítja a kerék- vagy csúszkapozíciót, amelynek abszolút értéke vagy változása numerikus értékkel kiolvasható.
3 csatornás saját kapacitásmérési elvű kerék- és csúszkaérzékelők
Az ilyen eszközök széles körben használhatók funkcióválasztásra (pl. mosógépprogram) vagy folyamatos szabályzásra (hangerő, fényerő).
Az Azoteq 3, 7, 9, 12, 16 vagy többcsatornás vezérlői rugalmasan programozhatók, a csatornák feloszthatók diszkrét gombok, közelítésérzékelő csúszkák és kör alakú érzékelőcsoportokra, amelyek akár saját kapacitás, akár kölcsönös kapacitáselven működhetnek (7. ábra).
7. ábra
Érintőbillentyűzet, érintőpad és gesztuspadvezérlők (Keypad, Trackpad, Gesture pad)
A 7...16 csatornás vezérlőkben megfelelő számú csatorna áll rendelkezésre billentyűzetvezérlő, érintőpad és gesztuspad-vezérlő alkalmazásokhoz. Ha a vezérlő kölcsönös kapacitáselven működik és az elektródák mátrixszerű mintázatban vannak elhelyezve, az érzékelési pontok száma a sorok és oszlopok szorzata. Az aktuális érintési pozíciókat a meghajtó (Rx) elektródák léptetésével, és a vevő (Rx) elektródák szkennelésével lehet letapogatni.
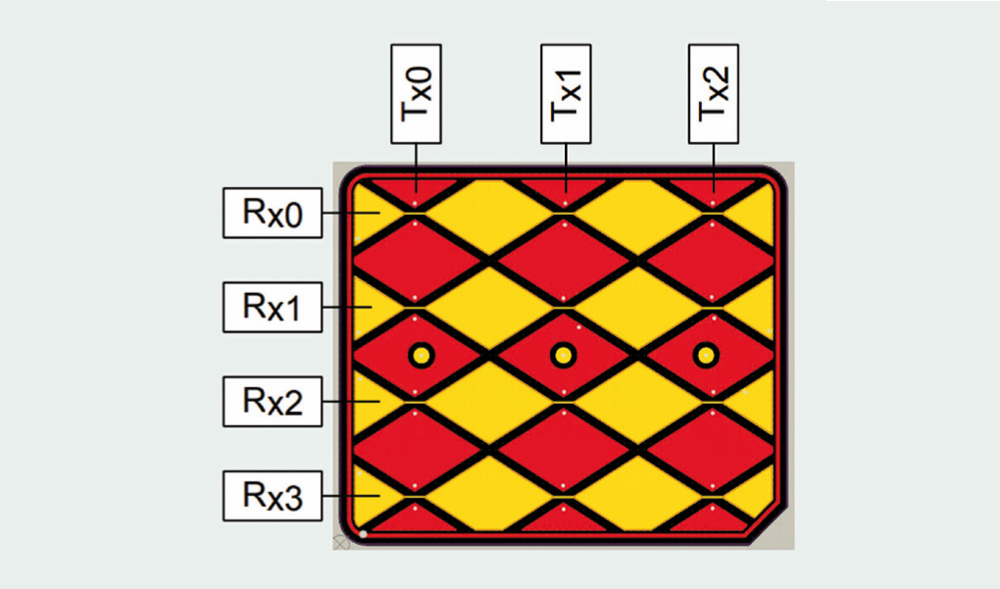
8. ábra
Érintőpad (trackpad) érzékelőelrendezés
Az éritést végző emberi ujj felülete több szomszédos csatornára hat, a ProxSense eljárás nagy érzékenységéből adódóan ezek közötti súlyozott átlagból az elektródasűrűségnél nagyobb érintési pontosság határozható meg, ami lépcsőzetességmentes-mozdulatkövetést biztosít. A vezérlőkben egy és kétujjas gesztusfelismerés működik, a négy különböző irányú simítás, rövid érintés (tap), érintés és tartás (hold), a kétujjas érintés, csiptetés, illetve görgetés megkülönböztetése kiválóan használható kreatív mozdulatvezérléses felhasználói interfész megvalósítására, emellett egyes pozíciókba akár dedikált érintőgombokat is lehet helyezni (8. ábra).

9. ábra
Érintőpad és gomb egy felületen (9. ábra)
Az Azoteq partnerei részére nem csak a vezérlő IC-ket, hanem változatos alakú és tulajdonságú professzionális gesztusérzékelő és touchpad-modulokat is kínál, legyen szükség akár merev vagy hajlékony felületre, billentyűzetmintára, vagy az érzékelőbe integrált visszajelző fények beépítésére. Ugyancsak megtalálhatók a választékban a kész érintőpad-modulok. (10. ábra)

10. ábra
Érzékelés nagy vastagságú fa vagy üveg felület mögött
Az Azoteq IC-k érzékenysége lehetővé teszi az akár 11 mm vastag szigetelő anyagon (fán vagy üvegen) keresztül történő érzékelést. Ez a képesség nagy felbontással és nagy pontossággal párosul. Bútorokba, háztartási gépekbe, igényes burkolatok vagy vastag üveg mögé rejtett kapacitív kapcsolók szükségtelenné teszik a díszburkolat felületének lyukakkal vagy kivágásokkal történő megszakítását. (11. ábra)

11. ábra
Kapacitív érzékelés fémfelületen, vagy vizes környezetben
Vezető felületen keresztül természetesen nem lehetséges kapacitív érzékelés, viszont lehetséges olyan struktúra létrehozása, ahol egy fémfelület minimális nyomás alkalmazásával bekövetkező alakváltozásával létrejövő kapacitásváltozás az érintésvezérléshez hasonló módon vezérlésre használható.
Ha az érzékelőelektródákat tartalmazó NyÁK elé egy vékony (0,13 mm), szilárd kétoldalas ragasztóanyagot (szigetelőt), majd az elé egy vékony (<0,1 mm), rozsdamentes acéllemezt vagy egy a belső oldalán vezetőpasztával bevont műanyag lemezt (<0,3 mm) ragasztunk, az elektródák és a lemez között kapacitás jön létre. (12. ábra)
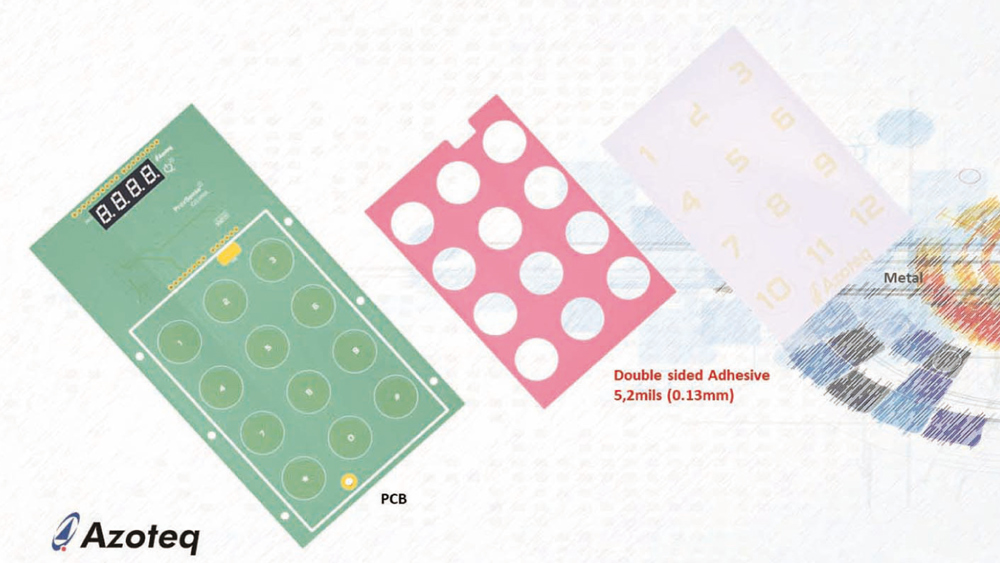
12. ábra
Ez a kapacitás minimális erő (<100 gramm) hatására olyan mértékben változik meg, hogy az biztosan detektálható az Azoteq integrált áramköreivel. Az ilyen érintőfelületek vandálbiztos és csapadéknak kitett környezetben is használhatók, akár kaputelefonokban vagy zuhanykabinban való alkalmazásuk is lehetséges. (13,14,15. ábra)

13. ábra

14. ábra

15. ábra
Támogatás
Az érzékelőelektródák tervezése nagy figyelmet és tapasztalatot kíván a fejlesztő mérnököktől. Az Endrich céggel együttműködve Európában az Azoteq széles körben támogatja partnerei tervezési tevékenységét referenciadizájn, konzultáció vagy kész tervek véleményezése terén. A vezérlők között egyszer programozható és újraprogramozható változatok is szerepelnek. Az egyszeri költségen felül a minimális darabonkénti árért cserébe az Azoteq az ügyfelei által tesztelt beállításokat beprogramozva tudja szállítani az áramköröket.
Az Endrich és az Azoteq 2018 óta működik együtt. Érdeklődő partnereinket kérjük, keressék az Endrich GmbH budapesti képviseletét.
Szerzők: |
Veresegyházy Zsolt – üzletfejlesztési és értékesítő mérnök; |
Kiss Zoltán – exportigazgató, |
|
Endrich Bauelemente Vertriebs GmbH |
Endrich Bauelemente Vertriebs GmbH
Sales Office Budapest
1191 Budapest, Corvin krt. 7-13.
Tel.: + 36 1 297 4191
E-mail : Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.
www.endrich.com














