



Digitális teljesítményátalakítás: tisztázzunk néhány félreértést
 A teljesítményelektronika akár egy külön „sziget” is lehetne az elektronika világában, sajátos követelményekkel és megoldásokkal. Azonban nincs olyan elektronikai eszköz, amiben ne lenne szükség tápellátásra – a téma tehát „közérdekű”. E területen is tért nyer a digitalizáció, amelyre egyesek a jelen felesleges elbonyolításaként, mások a jövő egyedül üdvözítő megoldásaként tekintenek. Mint minden vitatott területen, itt is sok a félreértés és tévhit, amelyeket a Microchip Technology cikke próbál meg a „helyükre tenni”.
A teljesítményelektronika akár egy külön „sziget” is lehetne az elektronika világában, sajátos követelményekkel és megoldásokkal. Azonban nincs olyan elektronikai eszköz, amiben ne lenne szükség tápellátásra – a téma tehát „közérdekű”. E területen is tért nyer a digitalizáció, amelyre egyesek a jelen felesleges elbonyolításaként, mások a jövő egyedül üdvözítő megoldásaként tekintenek. Mint minden vitatott területen, itt is sok a félreértés és tévhit, amelyeket a Microchip Technology cikke próbál meg a „helyükre tenni”.
Az analóg teljesítményátalakítás a teljesítményelektronika „szilárd pontja” volt évtizedeken keresztül, ezért számos tervező ma még aránylag kevéssé ismeri a digitális teljesítményátalakító-megoldásokat. Attól függően, kit kérdeznek, egyesek a teljesítményelektronika „második eljöveteléről”, mások felesleges extravaganciáról beszélnek. A valóság az, hogy ez a technológia új képességeket és előnyöket kínál azokban a rendszerekben, amelyekben erre szükség van. A digitális teljesítményátalakítás számos különböző megoldást takar, és – ha megfontoltan használják – a digitális technológiák sok előnnyel járhatnak. E cikk néhány általános félreértést és hibás értelmezést jár körül, hogy segítsen megérteni a teljesítményátalakítás digitális technológiáinak kihívásait, előnyeit és megfelelő használatát.
A kapcsolóüzemű tápegységek kizárólag analógok vagy digitálisak?
A kapcsolóüzemű teljesítményátalakító egy alapvetően kevert jelű rendszer. Az impulzusszélesség-moduláció (Pulse Width Modulation – PWM) jelei digitálisak, a visszacsatoló jel viszont analóg. Ami a két fontos pont között történik, az egy nagyon pontosan időzített analóg/digitális átalakítás. Ez történhet úgy is, hogy egy erősítő-alapú szabályozóáramkör dönti el, hogy mikor kell kapcsolni, de úgy is, hogy a digitalizált visszacsatolt jelből egy digitális algoritmus számítja ki a kapcsolás időpontját. A legtöbb esetben az analóg szabályozócsipeknek van digitális interfészük a külső vezérlés felé, és a digitális mikrovezérlők is tartalmaznak analóg részegységeket, amelyekkel akár tápegységeket is vezérelhetnek (1. ábra). Mindig is lehetséges volt egy tápegységet egy mikrovezérlővel „felokosítani”, de ma a mikrovezérlőknek minden eddiginél nagyobb szerep jut a rendszerek működésében, olyannyira, hogy akár az egész szabályozóhurok is megvalósítható egy digitális jelvezérlő[1] segítségével. Bármelyik módszert használják is, a tápegységek rugalmasabbak, könnyebben beállíthatók lehetnek, és intelligensebben reagálhatnak a környezeti feltételek vagy a környezetből érkező bemenőjelek behatásaira. A tápegységek ezekkel a tulajdonságokkal attól függetlenül kiegészíthetők, hogy a szabályozóhurok digitális vagy analóg elven működik-e. Napjainkban a kapcsolóüzemű tápegységek olyan sok digitális logikát tartalmazhatnak, amennyit csak az alkalmazás megkíván.
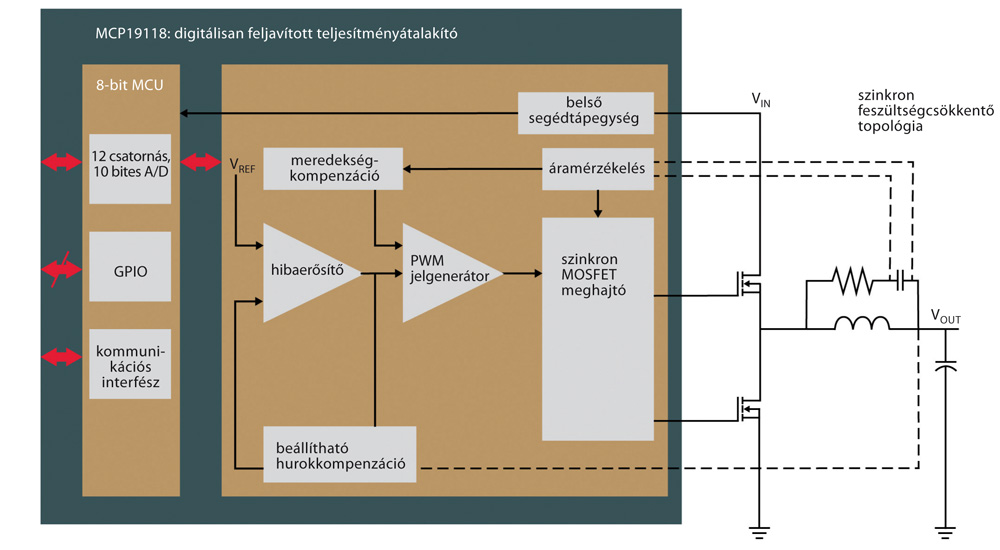
1.ábra Példa egy analóg szabályozóhurok digitális menedzsmentjére: az MCP19118
A digitális képességek csak digitális szabályozóhurokkal valósíthatók meg?
A szabályozás módja csak egy a teljesítményátalakító rendszer tulajdonságai közül. Egy mikrovezérlő bármilyen analóg rendszerbe beépíthető abból a célból, hogy járulékos felügyeletet vagy irányítást valósítson meg az adott tápegységben. Régebben egy mikrovezérlőnek azt a képességét, hogy egy analóg szabályozóhurokba beavatkozzék, erősen behatárolták a szükséges analóg elemek dinamikus konfigurálhatóságának korlátai. Az újabb analóg szabályozóelemek azonban a korábbi eszközgenerációknál sokkal több digitális interfésszel, tágabb konfigurálási és programozási lehetőségekkel rendelkeznek. Léteznek továbbá integrált teljesítményátalakító termékek is csipre integrált mikrovezérlővel, és ez új dimenziókat nyit meg a dinamikus konfigurálhatóság terén. Ha okosan választják meg a teljesítményátalakító eszközt, számos tulajdonság (az „alvó” üzemmódok, a kapcsolási frekvencia eltolása, a szinkronizáció, a lágyindítás, az intelligens védelem a hibás működés vagy a kimeneti áram, illetve feszültség nem kívánt változásai ellen) intelligensen megvalósítható egy teljesítményátalakító rendszerben – függetlenül attól, hogy annak szabályozási rendszere analóg vagy digitális elven működik-e.
A digitális teljesítményátalakító rendszer kevésbé robusztus, mint az analóg?
A „robusztusság”, a környezet hatásaitól viszonylag független működőképesség egy összetett rendszertulajdonság, és sok dolgot lehet tenni azért, hogy akár egy analóg, akár egy digitális tápegység robusztusabbá váljon. A megvalósítástól függően lehetséges például egy analóg szabályozású tápegységet úgy kialakítani, hogy gyorsabban reagáljon a hardverproblémákra – gyorsabb működésű alacsony- vagy túlfeszültség-komparátorokat és/vagy ciklusonkénti érzékeléssel megvalósított áramkorlátozást használva ehhez. Viszont ezeket a tulajdonságokat egy digitális szabályozású tápegységben is megvalósíthatják, például azokat az analóg szerkezeti elemeket felhasználva, amelyeket a korszerűbb digitális vezérlőáramkörökbe ma már beépítenek. A digitális vezérlők tartalmazhatnak analóg áramkorlátozó komparátorokat. Ráadásul, a digitális képességekkel rendelkező tápegységek (beleértve az analóg szabályozóhurokkal megvalósítottakat is) létezik néhány olyan megkülönböztető előnye, amelyet a teljesen analóg felépítésű megoldásokkal nem lehet leutánozni. Olyan digitális programkódokat valósíthatnak meg, amelyek egy adott igényre szabott módon reagálnak a zárlatra és az alacsony feszültségű (brown out) hibaállapotokra, beleértve az egyedi igények szerinti lágyindítás, a lágy kikapcsolás, a csepptöltés, az időzítés vagy a hibaállapot megszűnte utáni ismételt újraindítás képességeit, amelyeket nehéz (vagy lehetetlen) lenne analóg szabályozóelemekkel megvalósítani. A digitális szabályozókörök vagy a csipre integrált visszacsatolóhálózatok csökkentik a minőség függőségét a külső passzív alkatrészektől, amelyek egyébként is hajlamosak megváltoztatni az értéküket vagy más tulajdonságukat a tartós használat során. Végül pedig a digitális interfészek diagnosztikai és távfelügyeleti információkat is képesek szolgáltatni, amelyekkel előre jelezhetők a jövőbeni problémák, és megelőzhetők a komoly következményekkel járó, váratlan rendszerkiesések. Ha a rendszerüket ellátják ezekkel a képességekkel, az egyszerű analóg célrendszereknél robusztusabb megoldást kaphatnak eredményül. A megvalósításra való tekintet nélkül minden tápegységet gondos vizsgálatnak kell alávetni, hogy jól működhessen annak teljes életciklusa során, és nincsenek olyan elvi megbízhatósági korlátozások, amelyek miatt a digitálisan megvalósított teljesítményátalakítók rosszabbul teljesítenének analóg megfelelőiknél.
A digitális teljesítményátalakítók költségesebbek?
Azoknak a fejlesztőknek, akik úgy vélik, a digitálisan szabályozott tápegységek költségesebbek analóg versenytársaiknál, nincs mindig igazuk. A digitális tápegységek azért lehetnek olcsóbbak, mert kevésbé precíziós (következésképpen kevésbé költséges) alkatrészekből is meg lehet tervezni azokat. Kisebb lehet a teljes alkatrészlistát alkotó elemek száma, amely mind a helyfoglalást, mind pedig a megoldás összköltségét csökkentheti. A digitális tápegységek pénzt takaríthatnak meg a teljes birtoklási költség[2] vonatkozásában is.
Azokban az alkalmazásokban, amelyek erősen változó terheléssel veszik igénybe a tápegységet, a tervezők nemlineáris és adaptív algoritmusokat is megvalósíthatnak, amelyek valamelyikével bármilyen működési feltételek között elérhető a lehető legnagyobb hatásfokú működés. Egy másik ok, amiért a digitális tápegységek üzemeltetési költsége kisebb lehet, az, hogy azok az alkatrészek öregedését is figyelemmel kísérhetik az eszköz aktív élettartama alatt, és figyelmeztethetik a felhasználókat, hogy az ebből következő pontatlan működést elkerülendő, végezzenek megelőző karbantartást. Így olyan – katasztrofális – alkatrészhibák is elkerülhetők, amelyek költséges, váratlan leállásokat okozhatnak.
A digitális tápegységeknek nagyobb a hatásfoka?
A digitálisan szabályozott tápegységek – még szélsőségesen változó terhelési feltételeknél is – nagyobb hatásfokú működést tesznek lehetővé. Ezt azzal érhetik el, hogy a terheléstől függő, adaptív algoritmusokat alkalmaznak, sőt még a rendszer topológiáját is meg tudják változtatni annak érdekében, hogy jobban megfeleljenek a használat körülményeinek – például olyan módszerekkel, mint a kapcsolási ciklus kihagyása[3]. A digitálisan szabályozott tápegységek nemlineáris és prediktív (előrejelző) algoritmusokkal is javíthatják a dinamikus választ a tranziens terhelésváltozásokra. Az analóg tápegységek éppen olyan jó hatásfokúak lehetnek, mint a digitálisan szabályozottak – de csak egy adott fix terhelésnél. Az analóg tápegységek azonban nem tudnak megfelelő választ adni arra a kihívásra, ha a terhelőáram eltér a tervezési optimumértéktől. Másrészt viszont egy digitális szabályozó saját áramfelvétele meghaladhatja egy analóg szabályozóhurkos megoldásét, ezért a digitálisan szabályozott tápegységek inkább a nagyobb kimenőteljesítményű alkalmazásokhoz felelnek meg, ahol a szabályozóelektronika nagyobb áramfelvételéből adódó többletteljesítmény-igényt ellensúlyozzák azok a megtakarítások, amelyek a terhelésváltozásokhoz jobban alkalmazkodó digitális szabályozóalgoritmusok működéséből adódnak.
A digitális szabályozók nagyobb latenciaideje kedvezőtlenül befolyásolja a tranziens viselkedést?
Egy digitálisan szabályozott rendszer latenciaidejét két jelentős ok határozza meg: a mintavételezési hatás és a számítási idő. Bármilyen teljesítményátalakítási módszernél a tranziensválaszt meghatározó törésponti frekvenciát mindig a fázistartalék (a stabilitás) kompromisszumaként lehet megválasztani. A digitális rendszerek alapvetően stabilak, ám a digitális szabályozás mintavételezett.
A periodikus mintavételezés (a szabályozási ciklusonként egy mintavétel) a hurok átviteli függvényében többlet-fázistolásként jelentkezik. Ezt nem könnyű kompenzálni, ezért a digitális rendszerben (azonos kompenzációs módszert feltételezve) ugyanakkora fázistartalékhoz alacsonyabb törésponti frekvenciát kell választani. Ráadásul a processzornak egyetlen kapcsolási cikluson belül kell elvégeznie az A/D-konverter kiolvasását és a referenciaérték kivonását, különben – az egy ciklusnál hosszabb számítási idő miatt – a latenciaidő egy újabb kapcsolási periódussal hosszabbodik meg.
Ugyanakkor azonban ezeknél a negatívumoknál nagyobb előnyök jelentkezhetnek a nemlineáris és előreszabályozó módszerek használatával, amelyek az analóg szabályozórendszerben nehezen vagy nem valósíthatók meg. A hátrány a digitális feldolgozás időigényéből adódik, amely miatt kompromisszumot kell keresni a processzor sebessége, a kapcsolási frekvencia, az algoritmus bonyolultsága és a tranziens válasz között. Ezeket a tervezés során nyilván figyelembe kell venni, de ebből nem szükségszerűen következik, hogy a digitális szabályozás tranziens válaszfüggvénye rosszabb az analógénál.
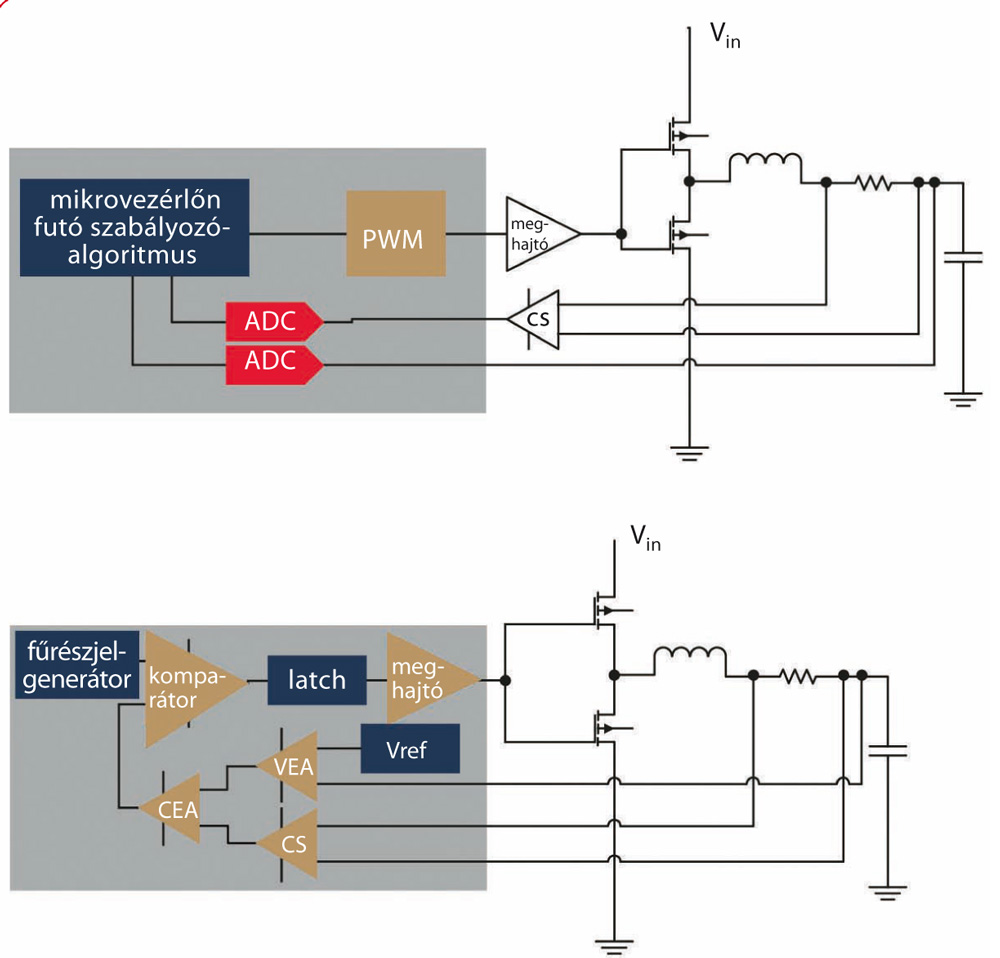
2. ábra A felső ábra egy kapcsolóüzemű tápegység digitális szabályozóköréhez szükséges rendszerelemeket mutatja, az alsón ennek analóg szabályozóhurkos ekvivalense látható
A terheletlen állapot problémát jelent?
A kapcsolóüzemű tápegységek tipikusan kétféle – megszakított és megszakítatlan – vezetésű üzemmódban működhetnek. A megszakított vezetésű üzemmódban az induktivitás árama minden egyes PWM-ciklus végéig zérusra csökken. A folytonos vezetésű üzemmódban az induktivitáson állandóan folyik valamekkora áram. A folytonos vezetésű üzemmód előnye, hogy az induktivitás áramának nem kell minden PWM-ciklusban nulláról felfutnia, így a kapcsoló PWM-ciklusonként több áramot tud leadni. Hátránya viszont, hogy a hibaerősítőből és hurokszűrőből álló hálózatnak megfelelő pólus-zérus elrendezéssel kell rendelkeznie a működés stabilitásának fenntartása érdekében. Szerencsétlen körülmény, hogy ha a folytonos vezetésű megoldásban az áram mégis nullára csökken, az a hurok instabil működését okozhatja. Ennek a problémának a megoldására a régebbi tervezésű rendszerekben vagy előírtak egy minimális áramot az induktivitáson, vagy egy minimális terhelőáramot tartottak fenn egy, a kimenettel párhuzamos előterhelő ellenállás beépítésével. Ezt nevezik „kényszerített folytonos vezetésű” (Forced Countinuous Conduction – FCC) üzemmódnak. Szerencsére ma már vannak olyan tápegységvezérlő áramkörök, amelyek mind folytonos, mind megszakított vezetésű üzemmódban képesek működni (a PWM és az impulzusfrekvencia-modulált (PFM) megoldásoknál egyaránt). Ezek olyan felügyeleti áramkört tartalmaznak, amelyek meghatározzák, mikor kell egyik üzemmódról a másikra átkapcsolni. Így tehát amíg régebben létezett egy tervezési kényszer, amely meghatározta, melyik üzemmódú megoldást kell választani, az újabb vezérlőáramkörök automatikusan kezelik az üzemmódváltást, és ez a korlátozás mára alig több, mint egy lábjegyzet a kapcsolóüzemű tápegységek tervezésének történetében.
A digitális szabályozású tápegységek tervezése nehezebb?
Egy digitálisan szabályozott tápegység tervezése nem szükségképpen nehezebb, mint egy analóg tápegységé, csak más. Az energiaátviteli lánc tervezése mindkét esetben szinte ugyanaz. A digitális szabályozóban – ahelyett, hogy analóg áramkört terveznének – a szabályozóhurok vagy kompenzátor funkcióját kell a digitális szabályozó firmware-jébe kódolva megvalósítani. A kompenzátor frekvenciaátvitelét a rendszer pólusainak és zérusainak elrendezése határozza meg, amelyet ugyanúgy meg kell tervezni, mint az analóg szabályozású rendszerben, de a digitális kompenzátort tervező szoftver gyakran támogatja a szabályozóhurok működéséhez szükséges optimalizálást is. Például az olyan, nagy mértékben optimalizált szoftverkönyvtárak, mint az általánosan ismert 2P2Z (II. típusú) és a 3P3Z (III. típusú) kompenzálóalgoritmusoknak a Microchip dsPIC családján futtatható változatai, a Microchip weboldaláról ingyenesen letölthetők. A tervezőknek tehát nem kell megírniuk ezeket a függvényeket. Ráadásul ezek az algoritmusok egy-egy konkrét energiaátviteli lánc igényeihez illeszthetők olyan paraméterek megadásával, amelyeket a szoftveres tervezési segédletekből kaphat meg a tervező.
A digitális tápegységeket könnyebb megtervezni az analógoknál (hiszen csak szoftverről van szó)?
Az a tény, hogy a digitális szabályozású tápegységek szabályozóalgoritmusait szoftverben kell megfogalmazni, a tervezést nem egyszerűsíti észrevehető mértékben. A tervezőnek továbbra is teljesen érteniük kell a szabályozórendszerek működését, és képesnek kell lenniük megfogalmazni és helyesen konfigurálni az energiaátalakító lánc frekvenciamenetére vonatkozó követelményeket akkor is, ha szoftveralapú kompenzálóalgoritmust használnak. Másrészt viszont a működés beállítását és a tápegység „finomhangolását” egyszerűbb lehet szoftvermódosításokkal kivitelezni, mintha a hardvert kellene módosítgatni ehhez.
Nem kell más, csak egy DSP? A digitális technika mindent helyettesít?
Bár sok „írástudó” úgy tekint a digitális teljesítményelektronikára, mint minden problémára megoldást kínáló „varázsszerre”, ez mégsem igaz minden alkalmazásban. Például nincs értelme egy „tenyérbemászó” méretű, beépített lítiumcellával táplált MP3-lejátszó tápellátását csak azért digitális módszerrel megoldani, hogy megnöveljék a készülék belső tápfeszültségét. Másrészt viszont egy csúcskategóriás szervernek tényleg szüksége van azokra a képességekre, amelyeket egyedül a digitálisan szabályozott tápegységek képesek nyújtani, hogy jó hatásfokkal állíthassák elő a szükséges tápteljesítményt és gyorsan tudjanak reagálni a terhelésváltozásokra. Például a mobiltelefon-hálózatok bázisállomásaiban nagy a tápáramigény, ha az adó be van kapcsolva. Ha viszont nem, akkor sokkal alacsonyabb az áramfogyasztás. Az adó vezérlője „előre tudja”, mikor kapcsolódik be az adó, így előre „figyelmeztetheti” erre a teljesítményátalakítót, ezzel koordinálva az átlagáram megnövekedéséhez szükséges üzemmódváltást. Ezáltal, amikor az adó elkezdi a nagy tápáramot igénylő működést, a tápegység már készen áll arra, hogy ennek eleget tegyen. Ez lehetővé teszi, hogy elkerüljük a tápfeszültség „bezuhanását”, ami addig tart, amíg a hurokszűrő válaszol a terhelésváltozásra – a már befejezett tényre utólag reagálva. Ez a digitális teljesítményátalakítók egyik hatékony képessége, és ez kiegyenlíti a bonyolultabb tervezésből származó hátrányokat.
Másrészt egy olyan rendszernek, amelynek aránylag állandó a teljesítményigénye, megoldható a tápellátás egy egyszerűbb felépítésű, könnyebben tervezhető és olcsóbb analóg szabályozású tápegységgel. És végül, elég nehéz árban és egyszerűségben versenyezni egy tömegtermékhez kifejlesztett, ASIC-alapú feszültségszabályozó céláramkörrel.
A szoftverrel definiált tápfeszültségellátás „átveszi a hatalmat”?
Néhány évvel ezelőtt az volt az előrejelzés, hogy a szoftverrel definiált rádió (Software Defined Radio – SDR) lesz a rádióvevők „alapértelmezett” megoldása. Míg az SDR-nek valóban van néhány komoly előnye, egy nagy hátránnyal is rendelkezik: olyan processzorra van szüksége, amelynek számítási teljesítménye 10…100 MIPS (millió utasítás másodpercenként). Még azok a rendszerek is igénylik ezt a nagy számítási teljesítményt, amelyek analóg keverőt használnak a belépő rádiófrekvenciás (RF) jel „lekonvertálására” a középfrekvenciára, és mindössze a demoduláció marad az egyetlen feladat, amit a processzornak végeznie kell. Ez egyértelműen nem túl költséghatékony. Ehhez hasonlóan nem lehet komolyan venni azt sem, amikor egyesek most azt mondják, hogy a szoftverrel definiált tápellátás (Software Defined Power – SDP) válik általánosan elterjedt megoldássá. Nincs egyszerűbb és olcsóbb, mint egy lineáris feszültségszabályozó még akkor sem, ha a szükséges számítási teljesítménnyel rendelkező processzorok ugyanannyiba kerülnek. Még ezeknek is szükségük van legalább egy lineáris, 5 V-os szabályozóra, hogy tápfeszültséggel lássa el a processzort. Bár az SDP-nek jól meghatározott helye van a teljesítményelektronika világában, és van olyan feladat, amit csak ezen a módon lehet megoldani, nincs, és soha nem is lesz olyan teljesítményátalakító-megoldás, amely kizárólagosan alkalmas lenne mindenféle méretű és bonyolultságú feladat megoldására.
Összefoglalás
Gyakran nehéz felismerni a marketingszöveget a valóban értékes információktól elválasztó vonalat, különösen, ha maga a piac is folytonosan változik, mint az a jelenlegi teljesítményelektronikai piacról is elmondható. A változások kezdeményezői túlhangsúlyozzák az új technológia érdemeit, és gyakran megfeledkeznek a velük járó kihívások említéséről. A konzervatívok viszont éppen a kihívásokra helyezik a hangsúlyt, és azzal érvelnek, hogy „ami nem rossz, azt nem kell megjavítani”. Természetesen egyik véglet sem helyénvaló. Jellemzően a termékeket a két szélsőség közti pályán kell végigvezetni, keverve a régit az újjal, és megtalálva a helyes „keverési arányt”, amely a soron levő fejlesztési feladathoz a legmegfelelőbb. Ez az oka annak, hogy a Microchip széles választékot ajánl a hagyományos analóg teljesítményátalakítóktól a digitálisig. Tudja mindenki, hogy a világ nem fekete és fehér, hanem egy kontinuum, és a Microchip a vásárlók rendelkezésére akar állni, bármilyen teljesítményátalakítási igénnyel szembesülnek.
www.microchip.com
Még több Microchip
[1] A „digitális jelvezérlő” szóösszetétel a Digital Signal Controller (DSC) kifejezés fordítása. Ez utóbbi leggyakrabban a Microchip Technology, Inc. terminológiájában fordul elő az olyan digitális jelfeldolgozók (Digital Signal Processor – DSP) megkülönböztetésére, amelyek jelfeldolgozó láncában analóg/digitális és digitális/analóg átalakítók is helyet kaptak. Ezekkel például elképzelhető olyan „egycsipes” megoldás, amelynek be- és kimeneti jelei analógok, miközben a belső jelfeldolgozás digitális technológiával történik. – A ford. megj.
[2] Ez itt a gazdasági számításokban gyakran használt Total Cost of Ownership (TCO) kifejezés fordítása. Ez egy eszköz beszerzési árán kívül tartalmazza mindazokat a ráfordításokat is, amelyekkel a tulajdonosának a termék teljes életciklusa során számolnia kell a beszerzéstől a telepítésen, a karbantartáson, a megbízhatóságból számítható valószínűségű javítási, karbantartási és beállítási költségeken át a leszerelésig és környezettudatos megsemmisítésig. Egy magas beszerzési árú eszköznek lehet tehát alacsonyabb a TCO-ja az olcsóbb megfelelőjénél, ha kevesebbet kell javítani, nem igényel költséges beszabályozást stb. – A szerk. megj.
[3] Ez a módszer az angol irodalomban „phase shedding” néven ismert, és azt jelenti, hogy alacsony terhelés mellett, amikor a tápegység kimeneti kondenzátora töltésvesztésének pótlásához olyan rövid impulzusokra lenne csak szükség, amely a véges fel- és lefutási idők miatt gyakorlatilag töltést nem is pótol, ezt az impulzust a vezérlés teljesen elhagyja, és ezzel csökkenti a kapcsolási veszteségeket. – A szerk. megj.














