



Haptika használata ember-gép interfészekben
 Modernkori társadalmunk az egyre kifinomultabb ember-gép interfészek (HMI-k) mellett minél hatékonyabb észleltető mechanizmusokat kíván, emiatt a fejlesztők haptikus technológiát alkalmaznak az ipar 4.0 területéhez kapcsolódó rendszerekben, az autóiparban, az orvosi és elsősegélynyújtó rendszerekben, valamint a dolgok internetével (IoT) kapcsolatos viselhető és más fogyasztói eszközökben.
Modernkori társadalmunk az egyre kifinomultabb ember-gép interfészek (HMI-k) mellett minél hatékonyabb észleltető mechanizmusokat kíván, emiatt a fejlesztők haptikus technológiát alkalmaznak az ipar 4.0 területéhez kapcsolódó rendszerekben, az autóiparban, az orvosi és elsősegélynyújtó rendszerekben, valamint a dolgok internetével (IoT) kapcsolatos viselhető és más fogyasztói eszközökben.
A haptikus eszközök például taktilis visszajelzésre használhatók VR- vagy AR- (virtuális vagy kiterjesztett valóság) alapú orvosi képzési és betegrehabilitációs rendszerekben, vagy figyelmeztetésre használhatják őket kormánykerekekben, hogy tájékoztassák a járművezetőket a potenciálisan veszélyes körülményekről. A haptikát más HMI-technológiákkal, például hanggal kombinálva is használják a minél érzékeltetőbb és valósághűbb érintős interfészek biztosítása érdekében.
A haptika alkalmazása során a tervezőknek egyéb problémák mellett többek között azzal is szembe kell nézniük, hogy a megfelelő haptikus technológiát válasszák (ERM vagy LRA), majd a kiválasztott technológiát megfelelően integrálják a rendszerbe a kívánt szintű visszajelzés eléréséhez, megfelelő vezérlést biztosítsanak, és ismerjék a módját annak, hogyan kell tesztelni őket a rezgésállóság, ütésállóság, a zajkeltés és a megbízhatóság szempontjából.
Ez a cikk rövid ismertetéssel kezdődik arról, hogy milyen előnyökkel járhat a haptikus visszajelzés bizonyos rendszerek esetében. Ezután bemutatja a haptikus technológia lehetőségeit, valamint létező haptikus eszközöket a PUI Audio-tól. Foglalkozik azzal is, hogyan integrálhatók haptikus eszközök különböző rendszerekbe, megemlítve példaként egy haptikus vezérlő IC-t is, végezetül a rezgésállóság és a generált akusztikus zaj tesztelésének részletes módszertanával zárul.
Multiszenzoros interfészek
A haptikát egyre gyakrabban használják a vizuális és auditív visszajelzéssel együtt, multiszenzoros környezetek létrehozására és az ember és a gépek közötti korszerűbb interakció biztosítására. Szinte bármely hétköznapi tárgy működhet haptikus interfészként, többek között a ruhadarabok, kesztyűk, érintőképernyők és egyéb tárgyak, például mobileszközök és számítógépes egerek.
A multiszenzoros interakció különösen hasznos olyan környezetekben, ahol egy nem vizuális HMI-elemnek (például haptikának vagy hangnak) köszönhetően a felhasználónak elegendő csak az adott feladatra koncentrálnia, mint például a gépek vagy sebészeti eszközök távvezérlése vagy az autóvezetés. Ha haptikát integrálunk HMI felületekbe, az fokozottabb manuális interakciót biztosíthat a virtuális környezetekben vagy a távvezérelt távoli rendszerekkel. Ha a legtöbbet szeretnék kihozni a haptikának HMI-be történő integrálásából, a tervezőknek ismerniük kell, hogy a különböző haptikus technológiák alkalmazása milyen működésbeli kompromisszumokkal jár.
Haptikus eszközök technológiái
A legelterjedtebb haptikus technológiák az ERM és az LRA. Az ERM (eccentric rotating mass – excentrikus forgó tömeg) esetében a motortengely súlypontján kívüli tömeget használnak a kiegyensúlyozatlanság és a rezgés létrehozására, és az ERM-alapú eszközöket viszonylag egyszerű egyenáramú (DC) feszültségekkel vezérlik. Az egyenáramú táplálás használata, valamint a viszonylag egyszerű mechanikai kialakításuk azonban számos kompromisszummal jár:
Előnyök:
- egyszerű vezérlés;
- alacsony költség;
- rugalmas formai kialakítás és méretek;
- egyszerűbb rendszerintegráció egyes konstrukciók esetében.
Hátrányok:
- magas energiafogyasztás;
- lassú válasz;
- nagyobb méretű konstrukció.
Ahelyett, hogy középponton kívüli tömeget használnának többtengelyes rezgések létrehozásához, az LRA (linear resonant actuator – lineáris rezonáns aktuátor) technológiás eszközök esetében a rezgéseket egy lengőtekercs, egy körmágnes és egy rugó segítségével hozzák létre. Az LRA-eszközöknél váltakozó áramú (AC) meghajtásra van szükség a lengőtekercs táplálásához. A váltakozó áram változó mágneses mezőt hoz létre a lengőtekercsben, aminek következtében a mágnes fel-le mozog. A rugó köti össze fizikailag a mágnest az eszköz házával, és rezgési energiát ad át a rendszernek. Mivel az LRA-eszközök lengőtekercs használatára épülnek, és nem pedig az ERM-ekben használt kefés technológiára hagyatkoznak, egyforma erősségű rezgések előállításához az utóbbiakhoz képest kevesebb energiát fogyasztanak. Az LRA-eszközök fékezhetők is, ha egy fázisban 180°-kal eltolt vezérlő jelet vezetnek rájuk, és ennek köszönhetően gyors válaszidőkkel rendelkeznek.
Az LRA-eszközök viszonylag szűk rezonanciasávokban (általában a ±2 és ±5 Hz közötti tartományokban) működnek hatékonyan. A gyártási tűrések, az alkatrészek öregedése, a környezeti feltételek és a szerelési szempontok miatt az LRA-eszközök pontos rezonanciafrekvenciája változhat, ami megnehezíti a vezérlőáramkörök tervezését. Az ERM technológiához képest az LRA-eszközök használata a tervezők számára más-más előnyökkel és hátrányokkal jár:
Előnyök:
- gyorsabb válaszidő;
- hatékonyabb működés;
- jobb gyorsulás;
- fékezhetőség;
- kisebb méretek lehetségesek.
Hátrányok:
- nem állandó rezonanciafrekvencia;
- problémás vezérlés;
- magasabb költség.
A működésbeli különbségeik mellett az ERM- és az LRA-eszközök tokozása is esetenként eltér egymástól. Az ERM-eszközök lehetnek érme- vagy rúdtokozásúak, míg az LRA-k tokozása lehet érme, prizma (téglalap) vagy hengerformájú (1. ábra). Az érmetípusú ERM- és LRA-eszközök átmérője általában körülbelül 8 mm, vastagságuk pedig körülbelül 3 mm. A rúdtípusú ERM haptikus eszközök nagyobbak, körülbelül 12 mm hosszúak és 4 mm szélesek.
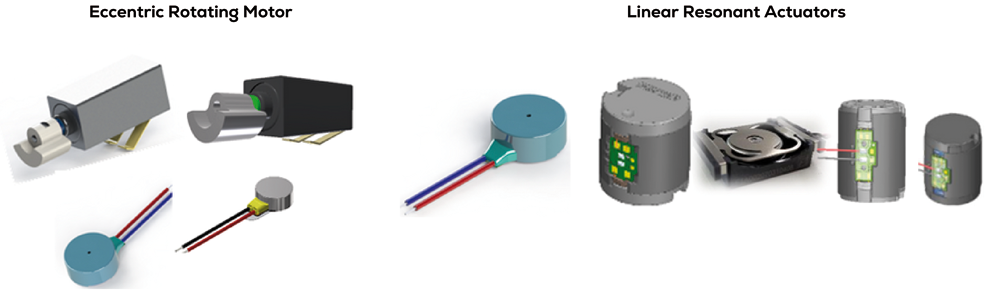
1. ábra Az ERM-ek rúd- vagy érmetípusú tokozásban, míg az LRA-k érme-, henger- vagy prizmaformátumokban kaphatók (Kép: PUI Audio)
Érmetípusú ERM-eszközök
Például a viselhető eszközöknél, vagy más olyan alkalmazásoknál, amelyeknél az érmetípusú ERM-eszközök használata lehet az előnyös, a tervezők a PUI Audio 8 mm átmérőjű, 3 mm vastag HD-EM0803-LW20-R jelű eszközét használhatják. A HD-EM0803-LW20-R főbb műszaki jellemzői a következők:
- 12 000 (±3 000) névleges fordulatszám percenként;
- 38 Ω záróellenállás (±50%);
- 3 voltos egyenáramú bemeneti feszültség;
- 80 mA névleges áramfelvétel;
- -20 és +60 °C közötti üzemi hőmérséklet-tartomány.
Azon készülékekhez, amelyeknek szélsőségesebb hőmérsékleti környezetekben kell működniük, a tervezők a HD-EM1003-LW15-R jelű eszközt választhatják, amely -30 °C és +70 °C közötti működésre alkalmas. Névleges fordulatszáma és mérete egyezik a HD-EM0803-LW20-R-ével, záróellenállása pedig 46 Ω (±50%), 85 mA névleges áramfelvétel mellett. Mindkét érmetípusú ERM-eszköz működtethető pozitív vagy negatív előjelű egyenárammal, és ez az óramutató járásával megegyező vagy ellentétes irányú forgást produkál. 20 mm hosszú vezetékekkel rendelkeznek, aminek köszönhetően rugalmasan csatlakoztathatók, és működés közbeni zajkibocsátásuk legfeljebb 50 dBA.
Rúdtípusú ERM-ek
A HD-EM1206-SC-R 12,4 mm hosszú és 3,8 mm széles. Névleges fordulatszáma 12 000 (±3 000) fordulat/perc, 3 volt egyenfeszültséggel történő táplálás mellett. Az eszközt -20 és +60 °C közötti hőmérsékleten való működésre tervezték, és zajszintje legfeljebb 50 dBA. Az alacsonyabb akusztikai zajszintet igénylő kialakításokhoz a HD-EM1204-SC-R (2. ábra) használható, amelynek működés közben a maximális zajszintje mindössze 45 dBA. A HD-EM1206-SC-R-hez képest magasabb, 13 000 (±3 000) fordulat/perc névleges fordulatszámmal és szélesebb, -30 és +70 °C közötti üzemi hőmérséklet-tartománnyal rendelkezik. Mindkét eszköz záróellenállása alacsony, 30 Ω (±20%), névleges áramfelvételük pedig 90 mA.

2. ábra A HD-EM1204-SC-R jelű ERM alacsony akusztikai zajszintet igénylő alkalmazásokhoz készült (Kép: PUI Audio)
LRA-eszközök
A gyorsabb válaszidőt, nagyobb energiahatékonyságot és erősebb rezgést igénylő kialakításoknál a PUI Audio 8 mm átmérőjű és 3,2 mm magas HD-LA0803-LW10-R jelű LRA-eszköze használható (3. ábra). Az LRA-eszközök haptikus működése pontosabb, mint az ERM-eszközök működése. Például az ERM-eszközök ellenállása 30 Ω (±20%) és 46 Ω (±50%) közötti, míg a HD-LA0803-LW10-R ellenállása 25 Ω (±15%). A HD-LA0803-LW10-R energiafogyasztása körülbelül 180 mW (2 Vrms × 90 mA), míg a fent tárgyalt ERM-eszközök 240–270 mW-ot fogyasztanak. Üzemi hőmérséklet-tartománya -20 és +70 °C között van.

3. ábra A HD-LA0803-LW10-R jelű LRA technológiás eszköz energiahatékony, és erős rezgésekre képes, gyors válaszidővel (Kép: PUI Audio)
Rendszerekbe történő beépítés
Érmetípusú haptikus eszközöknél a kétoldalas ragasztószalagokat részesítik előnyben szerelési módszerként, és a rendszernek történő rezgésátadást tekintve ez a legjobb megoldás. A kétoldalas szalagos eszközök vezetékformájú kivezetésekkel rendelkeznek, és furatszerelt technológiával kell rászerelni őket az áramköri lapokra kézi forrasztással. A rúd-, henger- és prizmatípusú eszközök kétféle beépítési típusban kaphatók: kétoldalas szalagos és rugós érintkezős. A kétoldalas ragasztószalagos típusú eszközök kézzel forrasztandó vezetékekkel rendelkeznek, az érmetípusú eszközökhöz hasonlóan. A rugós érintkezős típusoknál a rezgésátadási képesség van ötvözve az elektromos csatlakoztathatósággal. A rugós érintkezőknek köszönhetően nincs szükség kézi forrasztásra, ami egyszerűsíti a szerelést, és csökkenti a költségeket. A rugós érintkezőknek köszönhetően a helyszíni javítások is leegyszerűsödnek.
Haptikus eszközök vezérlése
Bár diszkrét alkatrészekből készült meghajtókat használni olcsóbb megoldás lehet (különösen a viszonylag egyszerű tervek esetében), érdemesebb mégis meghajtó-IC-ket alkalmazni, mert ezek segítségével kisebb méretű konstrukciók és gyorsabb piacra kerülés érhető el. Azoknál a rendszereknél, ahol kompakt és nagy teljesítményű megoldásokra van szükség, a tervezők felhasználhatják a DRV2605L jelű eszközt a Texas Instruments-től. A DRV2605L egy teljes zárt hurkú vezérlőrendszer, kiváló minőségű taktilis visszajelzéshez, amely ERM- és LRA-eszközök meghajtására egyaránt használható (4. ábra). A DRV2605L-el együtt a fejlesztők hozzáférést kapnak az Immersion TouchSense 2200 szoftverhez is, amely több mint 100 licencelt haptikus effektust, valamint egy hang-vibráció átalakító funkciót is tartalmaz.
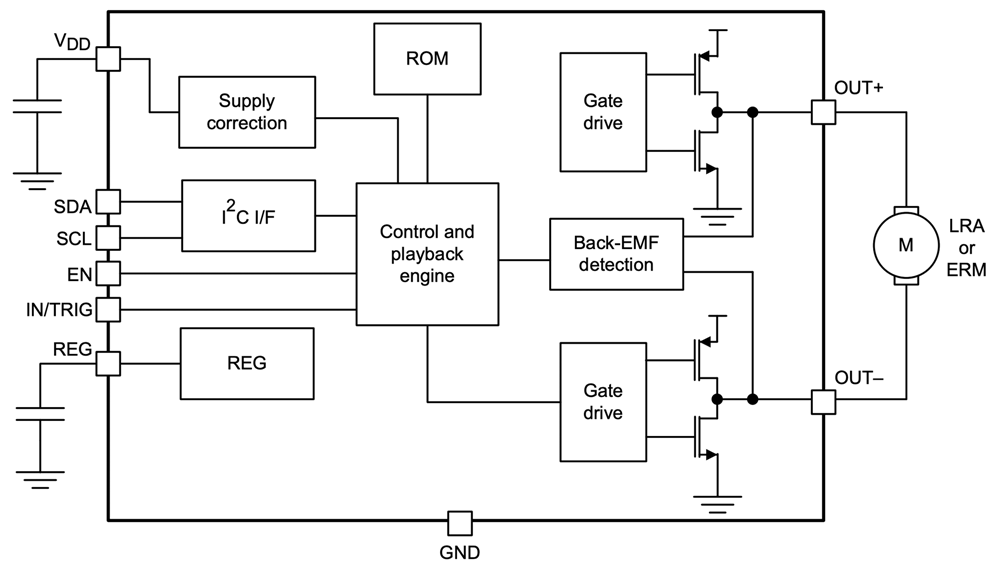
4. ábra A DRV2605L IC egyaránt képes LRA vagy ERM technológiás haptikus eszközök vezérlésére is (Kép: Texas Instruments)
Rezgésvizsgálat
Mivel a haptikus eszközök működése rezgésen alapul, fontos, hogy robusztus felépítésűek legyenek. A PUI Audio meghatározott egy tesztfelszerelést, amely a rázásállósági vizsgálathoz használandó, lásd az 5. ábrát. A vizsgálatot egy speciális rezgésvizsgálatokra programozható ipari minőségű elektrodinamikus rázótesztrendszerrel végzik, amely különböző körülményeket képes szimulálni, például szinuszos rezgést, véletlenszerű rezgést vagy mechanikus lökésimpulzusokat.

5. ábra A haptikus eszközök rezgésvizsgálatához ajánlott tesztberendezés (Kép: PUI Audio)
A PUI Audio három rezgésvizsgálatot ír elő haptikus eszközeire (lásd az 1. táblázatot). A tesztelés elvégzése és négyórás „pihenőidő” után az eszközöknek meg kell felelniük a névleges fordulatszámra (ERM típusok) vagy a gyorsulásra (LRA típusok), valamint az ellenállásra, a névleges áramra és a zajra vonatkozó előírásoknak.

1. táblázat A haptikus eszközök rezgésvizsgálati előírásai (Táblázat: PUI Audio)
A rezgésvizsgálat mellett a PUI Audio ütésállósági vizsgálatot is előír a következőknek megfelelően:
- Gyorsulás: félszinuszos 500 g
- Időtartam: 2 ms
- Teszt/oldal: 3 × 6 oldalról, összesen 18 ütés
A megfelelési/nem megfelelési kritériumok ugyanazok, mint a rezgésvizsgálatnál.
Akusztikai zaj mérése
A haptikus eszközök által keltett akusztikus (mechanikus) zaj szintje változó, és a zajszint minimalizálásában kulcsszerepet játszik, hogy az adott haptikus eszközt hogyan rögzítik a rendszer többi részéhez. A PUI Audio a 6. ábrán látható speciális vizsgálati elrendezést ajánlja a haptikus eszközök akusztikus zajának mérésére. A vizsgálatot 23 dBA környezeti zajjal rendelkező, árnyékolt helyiségben kell végezni. Ha az eszközt oly módon rögzítik a 75 g-os tesztberendezéshez, ahogyan azt a rendszerbe történő beépítése során is fogják, akkor ezen vizsgálat elvégzésével a tervezők számára kiderül a működés közben várható zajszint.

6. ábra A haptikus eszközök akusztikus zajának mérésére ajánlott tesztelőeszköz (Kép: PUI Audio)
Összegzés
A felhasználók számára biztosított taktilis visszajelzésnek köszönhetően a haptika kifinomultabb HMI-k létrehozására használható, továbbá segíthet a nagy teljesítményű multiszenzoros környezetek létrehozásában. A haptika használatának mérlegelésekor azonban a tervezőknek figyelembe kell venniük, hogy az ERM vagy az LRA technológiák melletti döntés milyen kompromisszumokkal jár, tudniuk kell, hogy ezek hogyan vezérelhetők hatékonyan, és hogyan kell tesztelni őket annak biztosítására, hogy a rendszer megbízhatósága és teljesítménye a szükséges szinteknek megfelelő legyen. Amint azt bemutattuk, a haptikus eszközök könnyen beszerezhetők, a vezérlő-áramkörökkel és a tesztelési eljárásokkal egyetemben.
Ajánlott olvasnivaló
- Bringing New Dimensions to HMI Implementation Without Needing Heavy Use of Resources
- How to Properly Implement Audible Alarms in Medical Monitoring
Szerző: Rolf Horn – Alkalmazástechnikai mérnök, Digi-Key Electronics
Digi-Key Electronics
www.digikey.hu
Angol nyelvű kapcsolat
Arkadiusz Rataj
Sales Manager Central Eastern Europe & Turkey
Digi-Key Electronics Germany
Tel.: +48 696 307 330
E-mail: Ez az e-mail-cím a szpemrobotok elleni védelem alatt áll. Megtekintéséhez engedélyeznie kell a JavaScript használatát.














